





Ведущий модуль перемещения с приводом
Ведущий модуль перемещения с приводом – звучит технически, но на деле это часто источник головной боли. Вроде бы простая штука – переместить что-то по прямой, но на практике возникает куча вопросов: точность позиционирования, плавность хода, надежность, интеграция с другими системами. И зачастую, вместо ожидаемой простоты, получается целая куча проблем, от которых голова идет кругом. Недавно столкнулись с довольно сложным кейсом, который заставил нас по-новому взглянуть на этот аспект роботизации. Хочется поделиться опытом, не претендуя на абсолютную истину, а просто рассказать, что получилось, а что – нет.
Обзор: за что отвечает ведущий модуль и почему он важен?
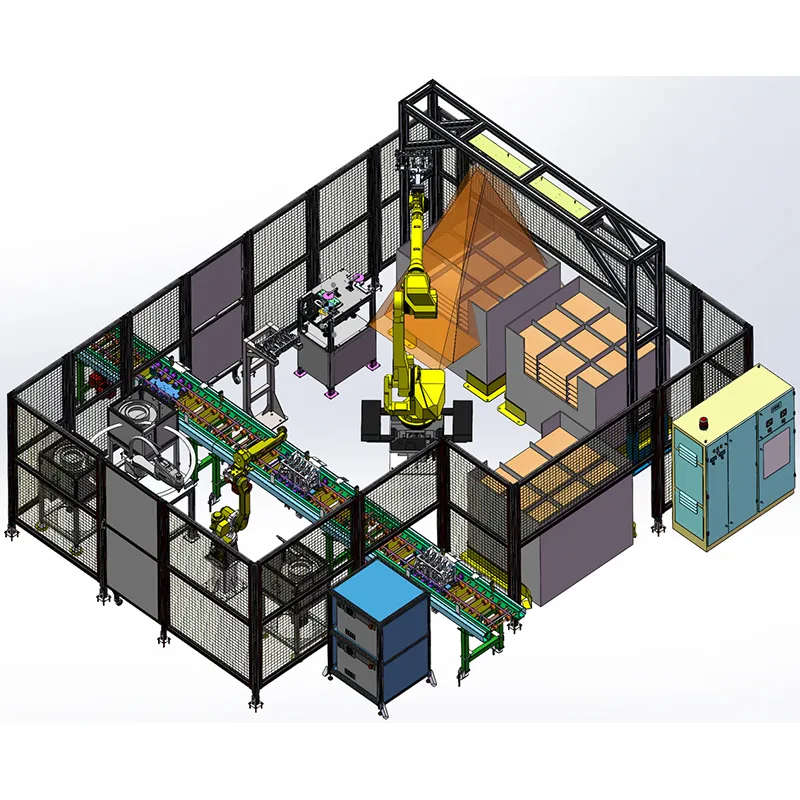
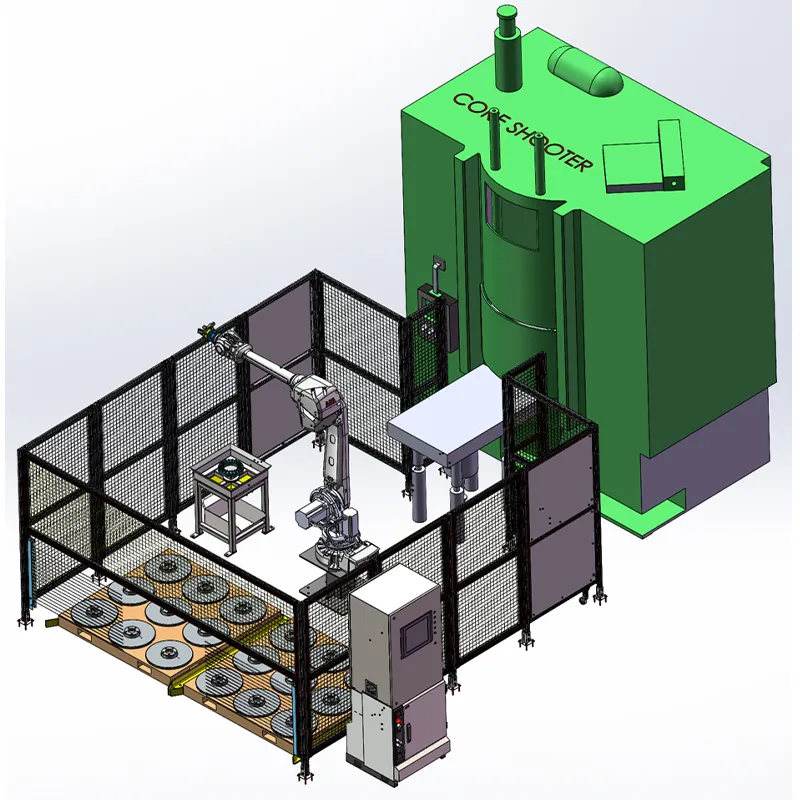
Прежде чем углубляться в детали, стоит четко понимать, что такое ведущий модуль перемещения с приводом и какую роль он играет в общей картине. В основном, это мобильная платформа, предназначенная для перемещения грузов, станков или других роботизированных элементов по заданному маршруту. Он может быть реализован на основе колес, гусениц или других типов приводов. И его роль не просто в перемещении, а в обеспечении высокой точности, стабильности и надежности процесса. Это фундамент для многих автоматизированных линий, особенно в производстве, логистике и фармацевтике.
Почему это важно? Во-первых, эффективность производства. Быстрое и точное перемещение элементов сокращает время цикла и повышает производительность. Во-вторых, снижение трудозатрат. Автоматизация процессов перемещения освобождает человеческий ресурс для более сложных и квалифицированных задач. В-третьих, повышение безопасности. Автоматизированные системы перемещения могут минимизировать риски травматизма, связанные с ручной транспортировкой тяжелых грузов.
Типы приводов и их особенности
Выбор привода – это ключевой момент. Здесь есть несколько основных вариантов: электрические моторы, пневматические приводы, гидравлические приводы. Каждый из них имеет свои преимущества и недостатки. Электрические моторы – наиболее распространенный вариант благодаря своей надежности, простоте управления и экологичности. Но они могут быть менее мощными по сравнению с гидравлическими. Пневматические приводы – хороши для быстрого и мощного перемещения, но требуют сложной системы сжатого воздуха. Гидравлические приводы – самые мощные, но сложны в обслуживании и могут быть источником утечек. Чаще всего мы используем комбинации электрических приводов и редукторов, чтобы добиться оптимального баланса между мощностью, скоростью и точностью.
Важно учитывать не только тип привода, но и его характеристики: крутящий момент, скорость вращения, точность позиционирования. Например, для задач, требующих высокой точности позиционирования, необходимо выбирать приводы с высокой точностью и низким уровнем люфта. Для задач, требующих высокой скорости перемещения, необходимо выбирать приводы с высокой мощностью и быстродействием.
Проблемы с точностью позиционирования
Одна из самых распространенных проблем с ведущим модулем перемещения с приводом – это низкая точность позиционирования. Причины могут быть разными: люфт в механизме, неточность работы датчиков, ошибки в управлении. Мы сталкивались с ситуациями, когда модуль отклонялся от заданного маршрута на несколько миллиметров, что приводило к браку продукции. Как мы решали эту проблему? Во-первых, мы проводили тщательную калибровку системы, чтобы выявить и устранить источники погрешностей. Во-вторых, мы использовали датчики обратной связи, чтобы контролировать положение модуля в реальном времени и корректировать его траекторию. В-третьих, мы оптимизировали алгоритм управления, чтобы минимизировать ошибки позиционирования.
Особое внимание стоит уделить роли энкодеров. Они обеспечивают обратную связь о текущем положении вала, позволяя системе точно определить пройденное расстояние и положение в пространстве. Однако энкодеры не идеальны: они могут давать погрешности из-за вибраций, температуры или загрязнений. Поэтому важно использовать высококачественные энкодеры и проводить регулярное обслуживание системы.
Интеграция с другими системами: сложность и возможности
Интеграция ведущего модуля перемещения с приводом с другими системами – это отдельная задача. Необходимо обеспечить взаимодействие с системой управления производством (MES), системой управления складом (WMS) и другими компонентами автоматизированной линии. Чаще всего используется протокол Modbus или EtherCAT для обмена данными между модулем и системой управления. Но могут возникать проблемы совместимости, особенно если используются системы от разных производителей. Например, мы столкнулись с проблемой совместимости между модулем перемещения и контроллером Siemens. Пришлось написать собственный драйвер для обеспечения корректной работы.
Важную роль играет выбор языка программирования для управления модулем. Чаще всего используется Python или C++. Python удобен для разработки прототипов и экспериментов, но C++ обеспечивает более высокую производительность. В идеале, необходимо разработать гибкую и масштабируемую архитектуру, которая позволит легко интегрировать модуль с другими системами в будущем. Это, кстати, особенно актуально, если планируется расширение автоматизированной линии.
Реальный пример: автоматическая дозаправка станков
Один из интересных проектов, над которым мы работали, – это автоматическая дозаправка станков с ЧПУ. Необходимо было перемещать контейнеры с СОЖ (жидкостью для резки) к станкам и обратно, обеспечивая точное позиционирование контейнера и избегая проливов. Для этого мы использовали ведущий модуль перемещения с приводом с электрическим приводом и системой датчиков уровня. Мы разработали специальный алгоритм управления, который позволял модулю точно позиционировать контейнер над станком и дозировать СОЖ в заданном количестве. Проект оказался успешным: автоматизация дозаправки сократила время цикла на 30% и снизила риск проливов.
Но, конечно, были и трудности. Например, приходилось учитывать вибрации, возникающие при работе станка. Это приводило к отклонениям от заданного маршрута. Для решения этой проблемы мы использовали систему активного управления, которая компенсировала вибрации и обеспечивала стабильное движение модуля. И еще одна проблема – необходимость защиты модуля от брызг СОЖ. Мы использовали специальный корпус с герметичными соединениями.
Выводы и рекомендации
Работа с ведущим модулем перемещения с приводом – это сложная, но интересная задача. Для успешной реализации необходимо учитывать множество факторов: тип привода, точность позиционирования, интеграцию с другими системами, безопасность. Не стоит экономить на качестве компонентов и программного обеспечения. Важно проводить тщательную калибровку системы и регулярное обслуживание. И, конечно, не стоит бояться экспериментировать и искать новые решения.
Если вы планируете автоматизировать процесс перемещения грузов, рекомендуем начать с тщательного анализа требований и выбора оптимального решения. Обратитесь к специалистам, которые имеют опыт работы с подобными системами. И помните, что успех зависит не только от используемых технологий, но и от профессионализма и опыта команды.
ООО ?Аньхой Мок Робототехника? оказывает широкий спектр услуг в области роботизации и автоматизации производственных процессов, включая разработку и внедрение систем перемещения с приводом. С их помощью можно решить самые сложные задачи, связанные с повышением эффективности и безопасности производства. У них на сайте https://www.mindlinkrobot.ru много полезной информации и примеры реализованных проектов.Соответствующая продукция
Соответствующая продукция








Самые продаваемые продукты
Самые продаваемые продукты








Связанный поиск
Связанный поиск- Ведущий регулятор давления газа
- Высококачественный обучение плк
- Высококачественный автоматические считыватели кодов
- Купить насос для подачи краски
- Регулятор давления для краскопульта
- Роботизированная шлифовка головки блока цилиндров двигателя поставщики
- Роботизированная разгрузка заводы
- Teach pendant поставщики
- Высоконапорный маслопровод
- Высококачественный соединитель кабельного лотка