





Ведущий плата управления промышленного робота
Как будто вопрос простой: выбираешь плату управления для робота – смотришь на мощность, интерфейсы, совместимость с контроллерами. Но как только доходит до конкретики, сразу вырисовывается куча нюансов. Часто вижу, как инженеры, имея неплохой теоретический багаж, упускают важные моменты, что потом приводит к задержкам в проекте и переделкам. Иногда кажется, что производители просто вываливают на рынок платы с заявленными характеристиками, а реальная производительность оказывается ниже ожидаемой. Это не значит, что все плохо, просто нужно понимать, что за цифрами скрывается.
Выбор платформы: между открытым исходным кодом и проприетарными решениями
Первое, с чем сталкиваешься – это выбор между открытыми решениями (например, на базе Linux) и проприетарными платформами. Открытый код дает гибкость, возможность кастомизации, доступ к большому комьюнити. С другой стороны, требуется больше времени на настройку, отладку и поддержку. Лично я склоняюсь к проприетарным решениям для большинства промышленных задач, особенно когда требуется высокая надежность и предсказуемость. Разумеется, это не исключает возможности использования open-source библиотек и инструментов внутри проприетарной системы. Влияет на выбор и сложность задачи: для простых манипуляций можно обойтись и с более бюджетными, 'открытыми' платформами, а для сложных задач, например, с точным позиционированием или динамической траекторией, проприетарный контроллер с проверенными алгоритмами будет надежнее.
Один из распространенных кейсов, с которым мы сталкивались в ООО ?Аньхой Мок Робототехника? (https://www.mindlinkrobot.ru), – это интеграция роботов с существующими производственными линиями, использующими устаревшие системы автоматизации. В таких случаях, несмотря на привлекательность открытых решений, зачастую проще и быстрее использовать проприетарный контроллер, который обеспечивает совместимость с существующими датчиками и исполнительными устройствами. Беспроводная связь – еще один момент, который стоит учитывать. Проприетарные системы часто предлагают более надежные и защищенные каналы связи, чем, например, беспроводные соединения на базе Wi-Fi.
Проблемы совместимости и драйверов
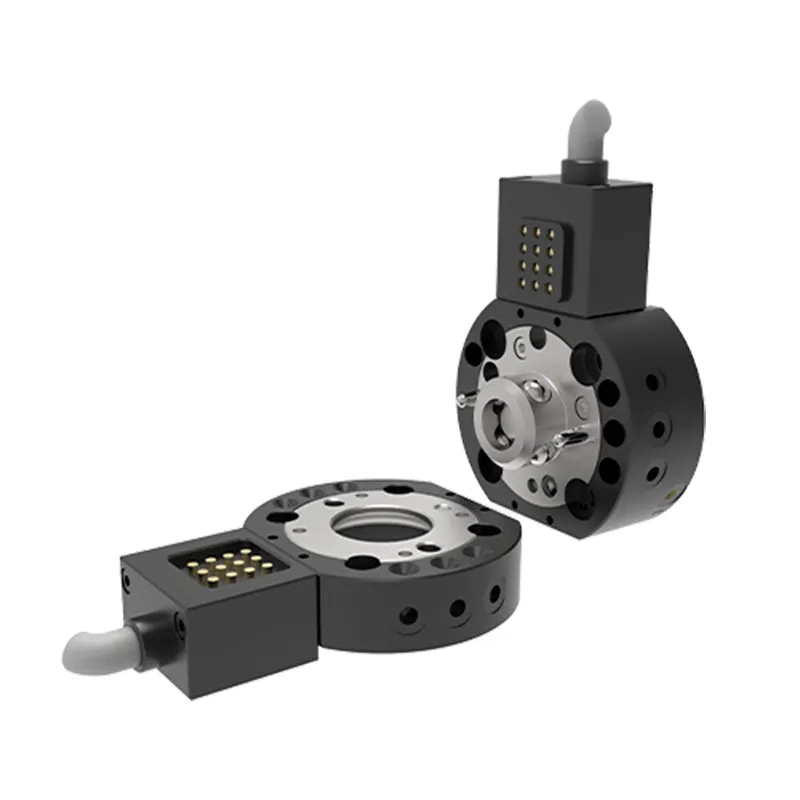
И вот тут начинается самое интересное – совместимость. Даже если плата управления кажется подходящей по характеристикам, могут возникнуть проблемы с драйверами, совместимостью с конкретными датчиками или исполнительными устройствами. Не всегда информация в документации производителя соответствует действительности, а поддержка от производителя может быть не оперативной. Это требует дополнительных усилий по отладке и настройке, что может существенно затянуть сроки запуска проекта. Мы однажды потратили несколько недель на решение проблемы с совместимостью определенного концевого инструмента (EOAT) с новой платой управления. Выяснилось, что драйвер для этого EOAT не был полностью оптимизирован для данной платы, что приводило к неточностям в позиционировании. В итоге, пришлось обратиться к производителю EOAT и разработать свой собственный драйвер – бесполезная трата времени и ресурсов.
Интерфейсы: выбор подходящего аналога
Важно обращать внимание не только на мощность процессора и объем памяти, но и на наличие необходимых интерфейсов. Это могут быть Ethernet, USB, CAN, serial, RS-485, и даже специализированные интерфейсы для подключения к конкретным датчикам или исполнительным устройствам. Часто бывает, что платы управления имеют слишком много ненужных интерфейсов, что усложняет их использование. Необходимо тщательно планировать архитектуру системы и выбирать только те интерфейсы, которые действительно необходимы. А также учитывать скорость передачи данных – для некоторых приложений требуется высокая скорость обмена данными, в то время как для других достаточно более медленных интерфейсов.
Теплоотвод и надежность: критически важные аспекты
Не стоит недооценивать важность теплоотвода. Плата управления, особенно при высоких нагрузках, может сильно нагреваться, что может привести к ее перегреву и выходу из строя. Использование эффективных радиаторов, вентиляторов или даже водяного охлаждения может существенно повысить надежность системы. Мы часто сталкиваемся с ситуациями, когда разработчики экономят на теплоотводе, а потом жалуются на нестабильную работу робота. Очевидно, что это неразумный подход.
Кроме того, важно учитывать надежность компонентов платы управления. Использование качественных компонентов от проверенных производителей может значительно снизить риск сбоев. Стоит также обратить внимание на наличие защитных механизмов от перенапряжения, перегрузки по току и короткого замыкания. В промышленных условиях, где часто возникают помехи и перепады напряжения, эти механизмы могут спасти систему от выхода из строя. Регулярное техническое обслуживание и мониторинг температуры платы управления – необходимые условия для обеспечения долговечности и надежности робота.
Специфические задачи: от шлифовки до напыления
В зависимости от задачи, требования к плате управления могут сильно отличаться. Например, для роботизированной шлифовки требуется плата с высокой точностью управления и возможностью обработки больших объемов данных с датчиков. Для роботизированного напыления важна высокая надежность и защита от пыли и влаги. В случае роботизированной подачи и съёмки заготовок, важна скорость реакции и возможность точного позиционирования. Каждый из этих сценариев требует своего подхода к выбору и настройке платы управления. Иногда, для решения специфических задач, приходится разрабатывать собственные алгоритмы управления и адаптировать существующие платформы под нужды конкретного приложения.
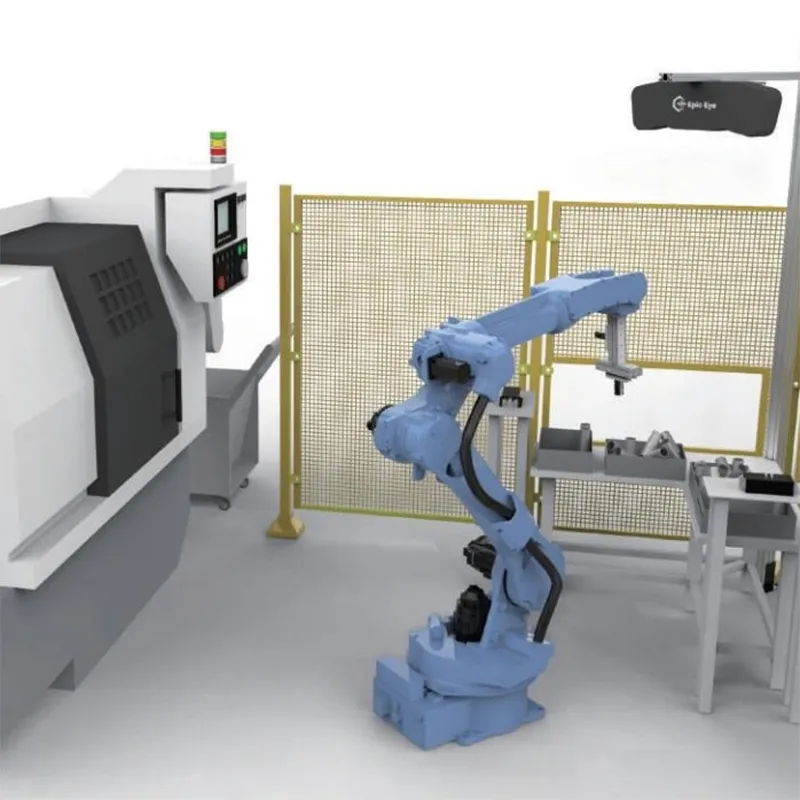
Например, при использовании роботизированного контроля, крайне важно обеспечить синхронизацию платы управления с системой машинного зрения. Это требует использования высокоскоростных интерфейсов и алгоритмов обработки данных в реальном времени. И, конечно, необходимо учитывать влияние внешних факторов, таких как освещение и вибрация, на точность измерений. ООО ?Аньхой Мок Робототехника? имеет большой опыт в разработке и интеграции систем машинного зрения с платами управления, и мы готовы предложить индивидуальные решения для ваших задач.
В заключение, выбор платы управления промышленного робота – это сложная задача, требующая учета множества факторов. Нельзя ограничиваться только характеристиками, указанными в документации. Важно понимать специфику задачи, учитывать особенности производственной среды и тщательно планировать архитектуру системы. В конечном итоге, успех проекта зависит от правильного выбора и грамотной настройки платы управления, а также от квалификации инженеров, занимающихся ее внедрением и обслуживанием.
Соответствующая продукция
Соответствующая продукция








Самые продаваемые продукты
Самые продаваемые продукты







Связанный поиск
Связанный поиск- Ведущий регулятор давления для краскопульта
- Роботизированная загрузка
- Высококачественный роботы efort
- Купить автоматический клеевой пистолет
- Роботы estun
- Известный электродвигатель промышленного робота
- Промышленные роботы kuka поставщики
- Купить роботы abb
- Высококачественный высоконапорный маслопровод
- Известный дозирующие насосы для окрасочных роботов