





Ведущий робот для шлифовки железнодорожных компонентов
Разработка эффективных решений для обработки железнодорожных компонентов – задача не из простых. Часто в разговорах всплывает идея о полной автоматизации, о роботе, способном заменить человека в этой монотонной, но критически важной работе. Но что на самом деле стоит за этой идеей? Насколько реально создать ведущий робот для шлифовки железнодорожных компонентов, который будет соответствовать всем требованиям по качеству, надежности и экономической эффективности? Я постараюсь поделиться своими мыслями и опытом, полученными за годы работы в этой сфере.
Проблема и текущие подходы
Традиционный метод шлифовки железнодорожных компонентов, таких как колесные пары, рельсы и другие элементы, предполагает ручной труд с использованием шлифовальных машин. Этот процесс трудоемкий, требует высокой квалификации оператора и подвержен влиянию человеческого фактора, что, безусловно, негативно сказывается на качестве и производительности. Кроме того, работа с большими и тяжелыми компонентами – это физически тяжелый труд, повышающий риск травм.
На рынке представлено несколько решений – стационарные роботизированные шлифовальные системы, мобильные роботы с манипуляторами и специализированные роботы для обработки поверхностей. Но, если честно, многие из них – это скорее прототипы или решения, требующие значительной доработки под конкретные условия эксплуатации. И самое главное – сложно найти робота, который был бы достаточно гибким и адаптивным для обработки компонентов разных размеров и форм. Не говоря уже о необходимости учитывать особенности геометрии рельсов и других деталей.
Я сталкивался с ситуациями, когда инженеры, с энтузиазмом предлагавшие автоматизацию, оказывались разочарованы сложностями интеграции робота в существующий производственный процесс. Проблема часто заключается в несовместимости робота с оборудованием, необходимых модификациях производственной линии и, конечно, в высокой стоимости внедрения. И, как следствие, в долгом периоде окупаемости.
Опыт работы с роботизированными решениями
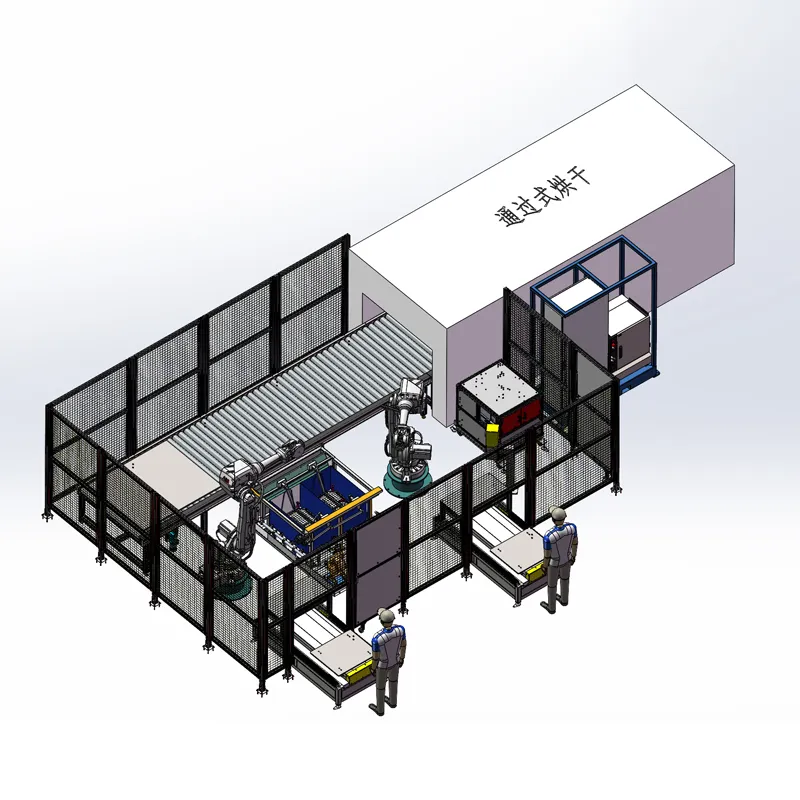
В рамках сотрудничества с ООО ?Аньхой Мок Робототехника? (https://www.mindlinkrobot.ru) мы рассматривали несколько вариантов внедрения автоматизированной шлифовки железнодорожных компонентов. Нам представили системы на основе 6-ти и 7-ми степеней свободы манипуляторов, оснащенных различными типами шлифовальных головок. Теоретически – отличные решения. Но на практике оказалось, что обеспечить требуемую точность и равномерность шлифовки на больших поверхностях – задача нетривиальная. Проблема заключалась в вибрациях, возникающих при работе с тяжелыми деталями, и в сложностях точной настройки траектории движения манипулятора.
Одним из интересных, но не совсем удачных экспериментов, было использование мобильного робота с манипулятором, оснащенного системой машинного зрения. Идея заключалась в том, чтобы робот самостоятельно определял геометрию поверхности и корректировал траекторию движения шлифовальной головки. В теории – это позволяло достичь высокой точности и адаптивности. Но на практике – система машинного зрения оказалась недостаточно надежной для работы в условиях переменного освещения и сложной геометрии деталей. Часто возникали ошибки в определении положения поверхности, что приводило к дефектам шлифовки.
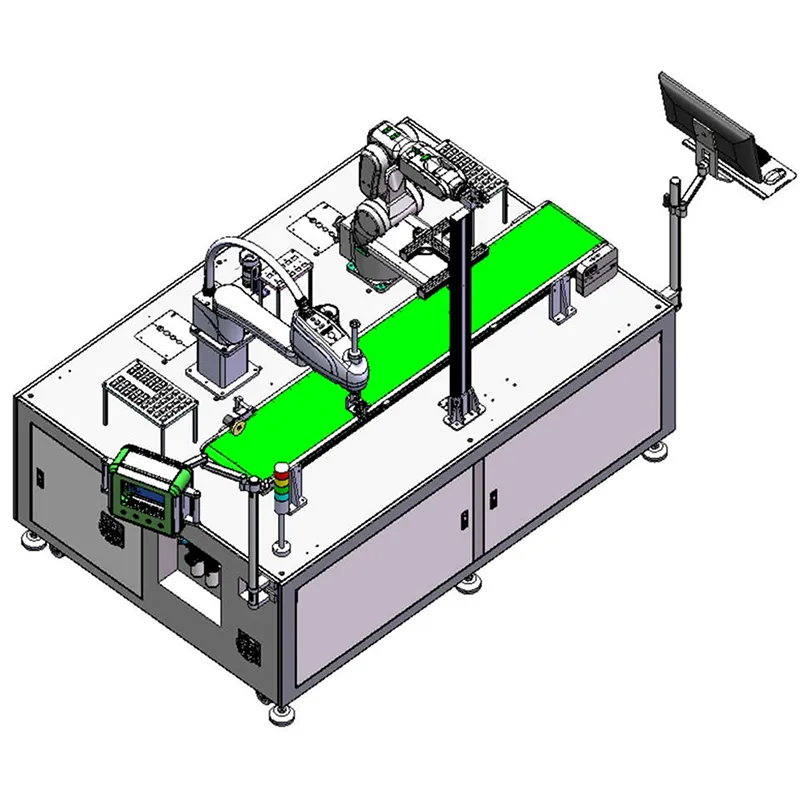
Однако, не стоит отчаиваться. Мы добились успеха в автоматизации шлифовки небольших деталей и компонентов. В частности, нам удалось разработать систему на основе стационарного робота с системой подачи и фиксации деталей. Этот робот использовался для шлифовки небольших рельсовых роликов и других элементов. Результаты оказались весьма положительными – производительность увеличилась в несколько раз, а качество шлифовки улучшилось. И самое главное – снизился уровень риска травм для рабочих.
Ключевые факторы успеха
В процессе работы мы выделили несколько ключевых факторов, влияющих на успех автоматизации шлифовки железнодорожных компонентов:
- Точность и надежность системы машинного зрения – необходима для автоматического определения геометрии детали и корректировки траектории движения робота.
- Система контроля вибраций – для обеспечения равномерной и качественной шлифовки больших поверхностей.
- Адаптивность робота – способность обработки деталей разных размеров и форм.
- Интеграция с существующим производственным оборудованием – необходимо для обеспечения бесперебойной работы производственной линии.
- Квалифицированный персонал – для настройки, обслуживания и ремонта роботизированной системы.
Будущее автоматизации
Я уверен, что в будущем мы увидим все более широкое распространение роботизированных решений в сфере обработки железнодорожных компонентов. Развитие технологий машинного зрения, искусственного интеллекта и новых материалов позволит создавать более гибкие, надежные и экономически эффективные роботы. Особенно перспективным представляется направление разработки роботов для обработки сложных геометрий, которые смогут самостоятельно адаптироваться к изменяющимся условиям эксплуатации.
ООО ?Аньхой Мок Робототехника? (https://www.mindlinkrobot.ru) активно работает над созданием таких решений. Они используют новейшие технологии и постоянно совершенствуют свои разработки. В частности, они работают над созданием систем на основе искусственного интеллекта, которые позволяют роботам самостоятельно оптимизировать траекторию движения и выбирать оптимальные параметры шлифовки.
Несмотря на все сложности и вызовы, автоматизация шлифовки железнодорожных компонентов – это неизбежный процесс. Он позволит повысить производительность, улучшить качество продукции и снизить уровень риска травм для рабочих. Главное – правильно выбрать технологию и надежного партнера.
Техническое обслуживание и ремонт роботизированных систем
Автоматизированные системы требуют регулярного технического обслуживания. Это включает в себя смазку подшипников, проверку и замену изношенных деталей, а также калибровку датчиков и систем управления. Обязательным элементом является также проведение профилактических осмотров, позволяющих выявить и устранить потенциальные проблемы до того, как они приведут к поломке оборудования.
Мы рекомендуем заключать договоры на техническое обслуживание с квалифицированными специалистами, имеющими опыт работы с конкретной моделью робота. Это позволит избежать дорогостоящих ремонтов и обеспечить бесперебойную работу производственной линии. Важно также иметь запасные части, необходимые для быстрого устранения поломок.
Своевременное обслуживание и ремонт – залог долгой и надежной работы роботизированной системы. Это позволит максимально использовать инвестиции в автоматизацию и обеспечить конкурентоспособность предприятия.
Соответствующая продукция
Соответствующая продукция






Самые продаваемые продукты
Самые продаваемые продукты









Связанный поиск
Связанный поиск- Ведущий устройство смены инструмента
- Роботизированная шлифовка отливок завод
- Электродвигатель промышленного робота завод
- Устройство смены инструмента
- Известный обучение плк
- Высококачественный кабельные соединители
- Известный регулятор давления воздуха
- Автоматизированная шлифовка чугунных отливок заводы
- Высококачественный фильтрующие рукава для оборудования пылевой фильтрации
- Кабели робота