





Визуальный контроль роботом
Визуальный контроль роботом – тема, которая в последние годы набирает обороты. Многие представляют себе автоматизированные линии, где роботы мгновенно и безупречно проверяют качество продукции. Но реальность часто оказывается сложнее. Попытки полностью заменить человеческий глаз автоматизированными системами не всегда приводят к желаемому результату. Этот текст – попытка поделиться опытом, как мы в ООО ?Аньхой Мок Робототехника? работаем с этой задачей, какие сложности возникают и какие решения мы находим.
От мечты к практике: что такое визуальный контроль роботом?
Начнем с определения. Под визуальным контролем роботом подразумевается использование систем машинного зрения для автоматической проверки изделий на соответствие заданным параметрам. Это может быть проверка размеров, формы, наличия дефектов (царапин, сколов, трещин), сборки, и т.д. В идеале, такая система должна быть откалибрована и настроена на конкретное изделие, чтобы выявлять отклонения, которые не заметны человеческому глазу или которые могут быть упущены из-за усталости оператора.
Почему это важно? Во-первых, повышение качества продукции – это очевидное преимущество. Во-вторых, снижение затрат на оплату труда операторов, особенно в монотонных операциях. В-третьих, повышение скорости производства, так как роботы работают непрерывно и не устают.
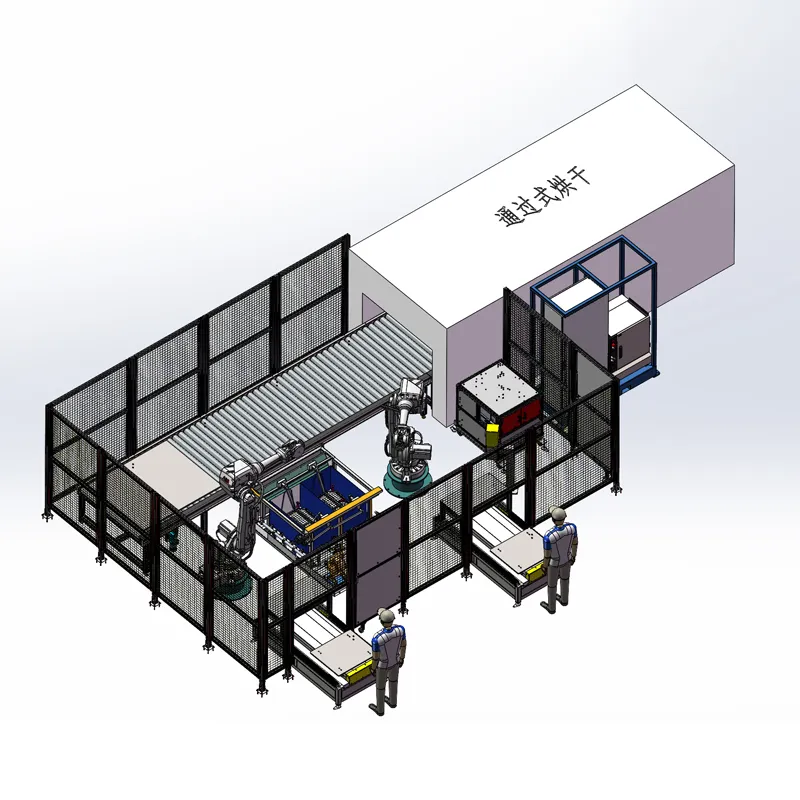
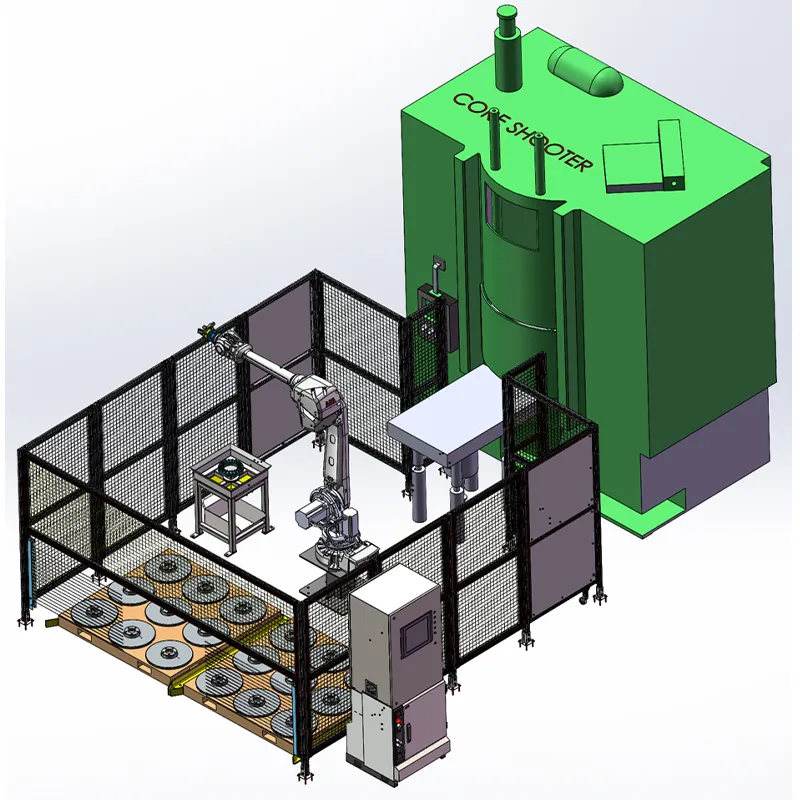
Наша компания, ООО ?Аньхой Мок Робототехника?, активно работает в сфере визуального контроля роботом уже несколько лет. Наши решения включают в себя разработку и внедрение комплексных систем машинного зрения, включающих в себя камеры, освещение, вычислительное оборудование и программное обеспечение. Мы не просто продаем оборудование, мы предлагаем комплексный подход, начиная от анализа требований клиента и заканчивая поддержкой и обслуживанием системы.
Основные компоненты системы визуального контроля
Система машинного зрения состоит из нескольких ключевых компонентов. Начнем с камер. Выбор камеры зависит от множества факторов: требуемого разрешения, скорости съемки, освещения, и т.д. Мы часто используем как монохромные, так и цветные камеры, в зависимости от задачи. Например, для контроля цвета чаще всего используют цветные камеры, а для измерения размеров – монохромные.
Следующий важный элемент – это освещение. Правильное освещение необходимо для получения качественных изображений. Мы используем различные типы освещения, включая прожекторы, светодиодные светильники, и даже специальные источники света, предназначенные для выделения определенных дефектов. Освещение должно быть равномерным и не создавать бликов, чтобы избежать ложных срабатываний.
Конечно, нельзя забывать о вычислительном оборудовании и программном обеспечении. Вычислительное оборудование выполняет обработку изображений, а программное обеспечение обеспечивает алгоритмы анализа изображений и выявление дефектов. Современные системы машинного зрения используют сложные алгоритмы, такие как глубокое обучение, для автоматического распознавания и классификации дефектов.
Проблемы и вызовы: что может пойти не так?
Как и в любой сложной инженерной задаче, в визуальном контроле роботом возникают определенные проблемы. Одна из наиболее распространенных – это сложность настройки системы. Необходимо подобрать оптимальные параметры для камер, освещения и алгоритмов анализа изображений. Это требует определенных знаний и опыта, а также значительного времени и ресурсов.
Еще одна проблема – это адаптация системы к изменениям в производственном процессе. Если изменяется конструкция изделия или параметры его производства, то необходимо перенастроить систему машинного зрения. Это может быть трудоемким процессом, особенно если система не спроектирована с учетом возможности гибкой настройки.
Мы сталкивались с ситуацией, когда клиенты пытались использовать визуальный контроль роботом для контроля изделий с очень сложной геометрией. Например, контроль сложных поверхностей с множеством углублений и выступов. В таких случаях требуется использование специальных алгоритмов и оборудования, что значительно увеличивает стоимость системы. В некоторых случаях, мы приходили к выводу, что ручной контроль остается более эффективным и экономически выгодным.
Пример неудачной попытки: контроль клепаных деталей
Недавно мы работали над проектом по контролю качества клепаных деталей. Клиент хотел автоматизировать процесс контроля, чтобы повысить скорость производства и снизить количество брака. Мы предложили использовать систему машинного зрения, которая должна была выявлять дефекты в местах соединения клепа. Но результаты оказались неудовлетворительными.
Проблема заключалась в том, что клепаные детали имели неровную поверхность, а угол наклона клепа мог сильно варьироваться. Система машинного зрения не могла справиться с этими вариациями. В результате, система выдавала много ложных срабатываний и не выявляла реальные дефекты. В конечном итоге, мы рекомендовали клиенту вернуться к ручному контролю, используя специализированные инструменты и обучение операторов. Это был горький опыт, но он научил нас тому, что не всегда автоматизация – это лучшее решение.
Практический опыт: что работает хорошо?
Несмотря на все трудности, визуальный контроль роботом может принести значительную пользу производству. Мы успешно внедряли такие системы в различных отраслях промышленности, включая автомобильную, электронную, и пищевую. Особенно хорошо работают системы, которые используются для контроля простых изделий с четко определенными параметрами. Например, контроль размеров, формы, наличия отверстий.
Мы также видим перспективные направления развития этой технологии. Например, использование искусственного интеллекта для автоматического выявления дефектов, которые трудно увидеть человеческому глазу. Мы сейчас работаем над проектом по разработке системы машинного зрения, которая будет использовать глубокое обучение для выявления микротрещин в металлических деталях. Такие системы могут значительно повысить надежность и долговечность изделий.
Еще одно перспективное направление – это интеграция визуального контроля роботом с другими системами автоматизации, такими как системы управления роботами и системы управления производством. Это позволяет создать полностью автоматизированную линию, где все процессы управляются компьютером и оптимизированы для максимальной эффективности.
В заключение: взгляд в будущее
Визуальный контроль роботом – это быстро развивающаяся технология, которая имеет огромный потенциал для повышения качества и эффективности производства. Но для успешного внедрения этой технологии необходимо учитывать множество факторов, включая сложность изделия, требования к точности и скорость, и наличие квалифицированного персонала.
Мы в ООО ?Аньхой Мок Робототехника? уверены, что визуальный контроль роботом станет неотъемлемой частью современных производств. Мы готовы предложить нашим клиентам комплексные решения, которые помогут им автоматизировать процесс контроля качества и повысить конкурентоспособность.
Если у вас возникли вопросы или вам нужна консультация по визуальному контролю роботом, пожалуйста, свяжитесь с нами. Мы всегда рады помочь.
Соответствующая продукция
Соответствующая продукция








Самые продаваемые продукты
Самые продаваемые продукты







Связанный поиск
Связанный поиск- Роботизированная сортировка поставщики
- Ведущий регулятор давления
- Балка подвешивания вагона поставщик
- Фильтрующие рукава для пылеулавливающего оборудования
- Купить алмазный шлифовальный круг черепашка
- Трубопроводная арматура шлифовка завод
- Известный тип двигателя робот
- Обучение работе с промышленными роботами
- Купить промышленные моющие средства
- Купить безвоздушный окрасочный пистолет