





Высококачественный роботизированное извлечение отливок из стержневых машин с помощью робота
Пожалуй, часто встречающийся запрос в последнее время – автоматизация извлечения отливок. Особенно когда речь заходит о крупногабаритных деталях, получаемых на стержневых машинах. Многие видят в этом простой переход от ручного труда к роботизированному, но на практике все не так однозначно. Затраты, сложность интеграции, необходимость кастомизации – это лишь часть вызовов, с которыми сталкиваются предприятия. В этой статье я попытаюсь поделиться опытом, полученным при внедрении подобных систем, выделив ключевые проблемы и возможные решения.
Проблемы и вызовы интеграции роботизированной извлечения отливок
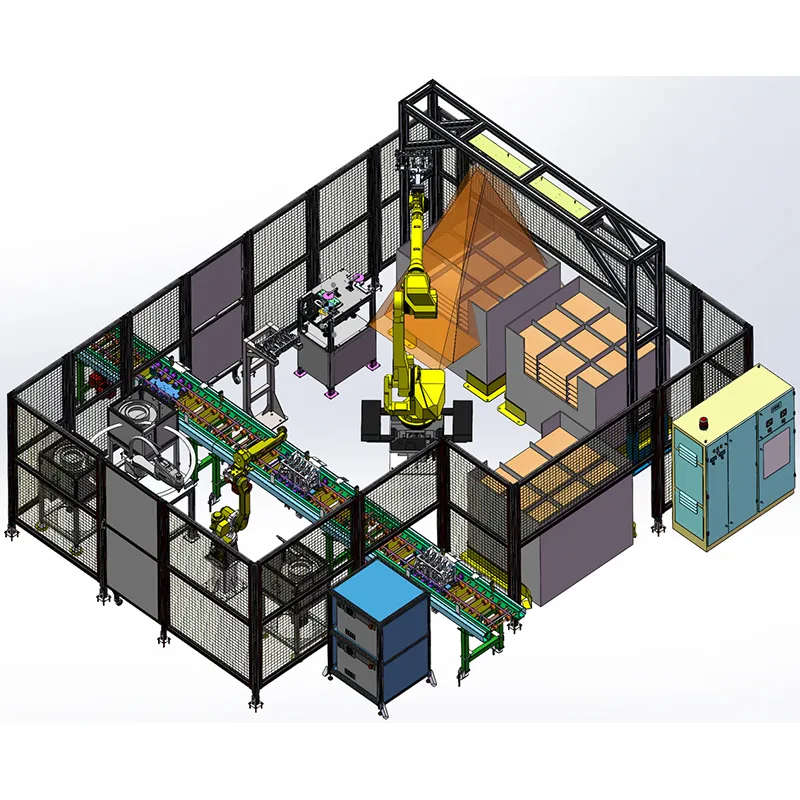
С самого начала стоит признать, что интеграция роботизированной извлечения отливок – это задача не тривиальная. Первым, что бросается в глаза – это необходимость разработки специализированного захвата (EOAT). Просто взять стандартную пастух-руку не получится. Форма отливки, ее вес, хрупкость – все это требует индивидуального подхода. Мы, например, столкнулись с серьезными проблемами при извлечении крупных, относительно тонких отливок с острыми краями. Стандартные захваты просто не держали, а при попытке применить более агрессивные методы – отливка получала повреждения.
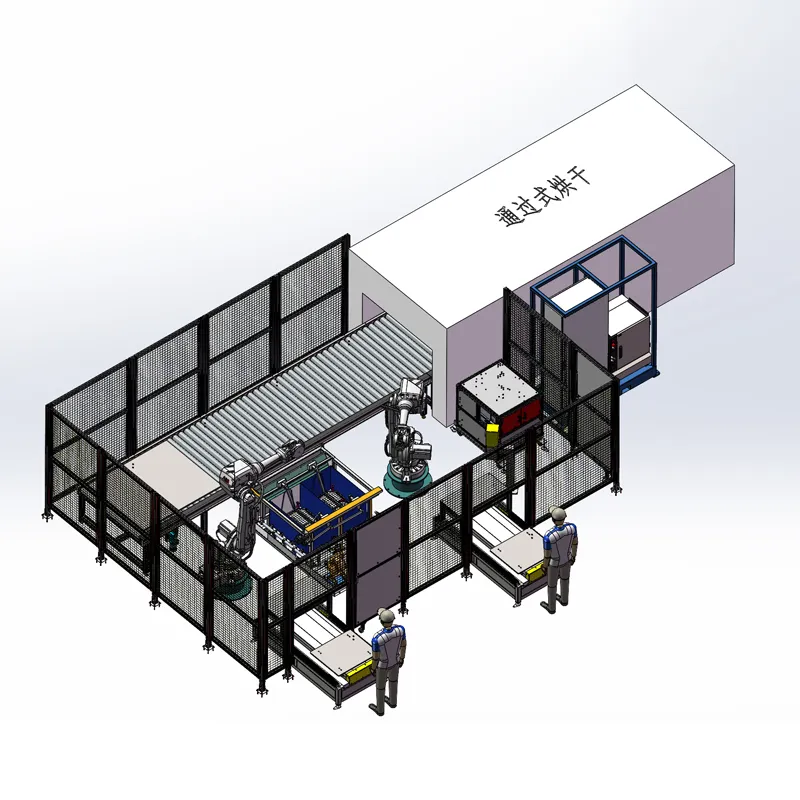
Второй немаловажный аспект – это координация робота с машиной. Стержневые машины, как правило, не предназначены для прямого взаимодействия с роботами. Необходимо обеспечить точное позиционирование робота относительно отливки, а также синхронизацию движений робота и машины. Это требует использования систем машинного зрения, позволяющих роботу 'видеть' отливку и корректировать свои движения в режиме реального времени. Причем система машинного зрения должна быть устойчива к изменениям освещения и другим факторам, которые могут повлиять на ее работу. Иногда проще и дешевле интегрировать система визуального контроля качества в процесс извлечения, что позволяет избежать дорогостоящей кастомизации роботизированной системы.
Да и сама робототехника не всегда идеальна. Например, роботы, используемые для извлечения тяжелых отливок, могут испытывать трудности с точностью позиционирования, особенно при работе с ограниченным пространством. Поэтому необходимо тщательно подходить к выбору робота и его конфигурации, учитывать все факторы, которые могут повлиять на его производительность.
Решения для эффективного роботизированного извлечения отливок
Одним из подходов к решению проблемы нестандартных форм отливок является использование гибких захватов. Они могут адаптироваться к различным формам и размерам, обеспечивая надежный захват. Однако, такие захваты требуют более сложного управления и контроля, поэтому необходимо тщательно продумать алгоритмы управления роботом.
Второй перспективный подход – это использование пневматических и гидравлических захватов. Они позволяют обеспечить высокий момент захвата, что особенно важно при работе с тяжелыми отливками. Однако, такие захваты могут быть менее точными, чем электрические. Поэтому для достижения оптимальных результатов необходимо использовать комбинацию этих двух подходов.
Мы в ООО ?Аньхой Мок Робототехника? активно разрабатываем решения, основанные на системах машинного зрения и алгоритмах глубокого обучения. Такие системы позволяют роботу 'учиться' распознавать различные типы отливок и адаптировать свои движения в режиме реального времени. Это особенно актуально при работе с партиями отливок различной формы и размера. Например, в одном из наших проектов нам удалось добиться значительного повышения производительности и снижения брака при извлечении сложных отливок с использованием этой технологии.
Опыт внедрения и практические советы
В процессе работы над проектами по роботизированному извлечению отливок мы выявили несколько важных факторов, которые необходимо учитывать при планировании и реализации подобных систем. Во-первых, необходимо тщательно проанализировать процесс извлечения и выявить все узкие места. Во-вторых, необходимо разработать детальную спецификацию требований к робототехнической системе. И, в-третьих, необходимо провести тщательное тестирование системы на прототипе перед ее внедрением в промышленную эксплуатацию.
Еще один важный момент – это безопасность. Роботы работают в непосредственной близости от людей, поэтому необходимо обеспечить надежную систему безопасности, предотвращающую травмы. Это включает в себя использование барьеров, датчиков безопасности и алгоритмов предотвращения столкновений.
Не стоит забывать и о поддержке со стороны поставщиков оборудования и программного обеспечения. Важно выбрать надежного партнера, который сможет оказать необходимую техническую поддержку и обучение персонала.
Будущее роботизированного извлечения отливок
Я уверен, что роботизированное извлечение отливок – это будущее этой отрасли. Автоматизация позволит повысить производительность, снизить затраты и улучшить качество продукции. Однако, для достижения этих результатов необходимо решать существующие проблемы и разрабатывать новые, более эффективные решения. Мы в ООО ?Аньхой Мок Робототехника? нацелены на разработку и внедрение инновационных технологий, которые помогут предприятиям достичь этих целей. Например, сейчас мы активно исследуем возможности использования искусственного интеллекта для автоматической оптимизации процесса извлечения отливок. Это позволит не только повысить производительность, но и снизить вероятность повреждения отливок. Мы также изучаем применение систем мониторинга состояния роботов для своевременного выявления неисправностей и предотвращения простоев. Это часть комплексного подхода, который мы предлагаем нашим клиентам.
Для более подробной информации о наших решениях и услугах, вы можете посетить наш сайт: https://www.mindlinkrobot.ru. Мы всегда готовы предоставить профессиональную консультацию и помочь вам в решении любых задач, связанных с автоматизацией производства.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
 Роботизированная паллетизация
Роботизированная паллетизация -
 Роботизированные устройства
Роботизированные устройства -
 Клеевой шланг
Клеевой шланг -
 Запасные части для роботов
Запасные части для роботов -
 Стационарные считыватели кодов
Стационарные считыватели кодов -
 Компоненты для процесса напыления
Компоненты для процесса напыления -
 4000-200s
4000-200s -
 Шлифовальный круг
Шлифовальный круг -
 Визуальные аксессуары
Визуальные аксессуары -
 Безопасные световые барьеры
Безопасные световые барьеры -
 Погружное покрытие песчаных стержней
Погружное покрытие песчаных стержней -
 3D автоматическая клеевые пистолет G005
3D автоматическая клеевые пистолет G005
Связанный поиск
Связанный поиск- Купить программируемые логические контроллеры плк
- Купить соединение плк сименс с телевизором
- Ведущий инверторные сплит системы
- Ведущий обучение плк
- Редуктор робота
- Известный роботы kuka
- Роботизированная шлифовка автомобильных компонентов завод
- Купить фильтр с регулятором давления
- Ведущий роботизированная окрасочная система
- Известный промышленные роботы kuka