





Высококачественный роботизированная подъёмно - транспортировка
Высококачественный роботизированная подъёмно - транспортировка – звучит как мантра, как заветная цель любого предприятия, стремящегося к автоматизации. Но реальность часто оказывается гораздо сложнее и полна нюансов. Многие видят в этом просто замену ручного труда, но это лишь верхушка айсберга. Речь идет о комплексной трансформации логистики, оптимизации производственных процессов и, в конечном итоге, повышении конкурентоспособности. В этой статье я поделюсь своим опытом и наблюдениями, основанными на реальных проектах.
От теории к практике: что такое 'высококачественная подъёмно-транспортная роботизация'?
Пожалуй, стоит сразу отбросить общие фразы про 'автоматизацию' и 'оптимизацию'. Под высококачественной роботизированной подъёмно-транспортировкой я подразумеваю не просто использование роботов для перемещения грузов. Речь идет о системном подходе, включающем в себя выбор оптимального оборудования, разработку алгоритмов управления, интеграцию с существующими производственными линиями и, что немаловажно, обеспечение надежности и отказоустойчивости всей системы. Это не единоразовая замена старых устройств на новые, а продуманная и комплексная разработка.
Часто встречается подход, когда компания выбирает робота, который, на бумаге, соответствует требованиям, но потом возникают проблемы с интеграцией, с программным обеспечением, с обслуживанием. Это, мягко говоря, не оптимальный вариант. Нужно учитывать множество факторов: характеристики материала, требуемая точность, скорость работы, особенности производственного процесса, существующую инфраструктуру. Попытка решить проблему 'после того, как она возникла' обходится крайне дорого – как в плане финансов, так и в плане времени.
Основные вызовы при внедрении роботизированной подъёмно-транспортировки
Первый и самый очевидный вызов – это выбор правильного робота. Здесь нет универсального решения. Тип робота, его грузоподъемность, скорость, тип захвата – все это должно соответствовать конкретным задачам. Например, для работы с крупногабаритными деталями потребуется один тип робота, а для работы с мелкими компонентами – совершенно другой. Важно провести тщательный анализ производственного процесса и определить все требования к системе.
Кроме того, необходимо учитывать особенности производственной площадки. Не всегда можно просто так взять и установить робота. Может потребоваться перепланировка помещения, установка дополнительных систем безопасности, модификация существующих конвейерных линий. Это все дополнительные затраты, которые нужно учитывать при планировании проекта. Еще один момент – интеграция с существующими системами управления производством (MES, ERP и т.д.). Если система не интегрирована, то эффективность всей автоматизированной линии значительно снижается. ВОО ?Аньхой Мок Робототехника? часто сталкивается с этой проблемой, особенно при работе с устаревшим оборудованием.
Проблемы с программным обеспечением и алгоритмами
Недооценивают роль программного обеспечения. Сам робот – это лишь аппаратная часть. Без правильно разработанных алгоритмов управления он не сможет выполнять поставленные задачи эффективно. Это касается как программирования траектории движения робота, так и разработки системы визуального контроля и управления. Например, в одном из проектов, с которым мы работали, робот был выбран, но программное обеспечение оказалось несовместимым с существующими системами визуального контроля. Пришлось разрабатывать собственное решение, что увеличило сроки и стоимость проекта.
Реальные кейсы и ошибки
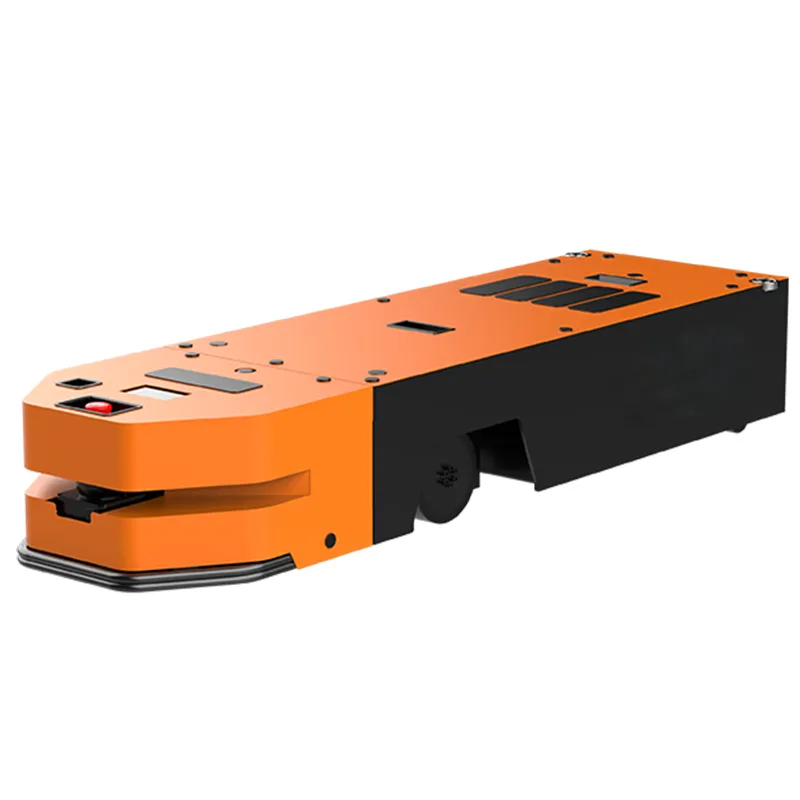
Помню один случай, когда компания решила внедрить AGV (автономные мобильные роботы) для транспортировки материалов по цеху. Заказчик был уверен, что это решит проблему с логистикой. Однако, не было учтено, что существующие проходы в цеху слишком узкие для AGV. Пришлось переделывать цех, что привело к значительным задержкам и перерасходу бюджета. Этот случай – отличный пример того, как важно проводить тщательный анализ условий эксплуатации перед внедрением любой автоматизированной системы.
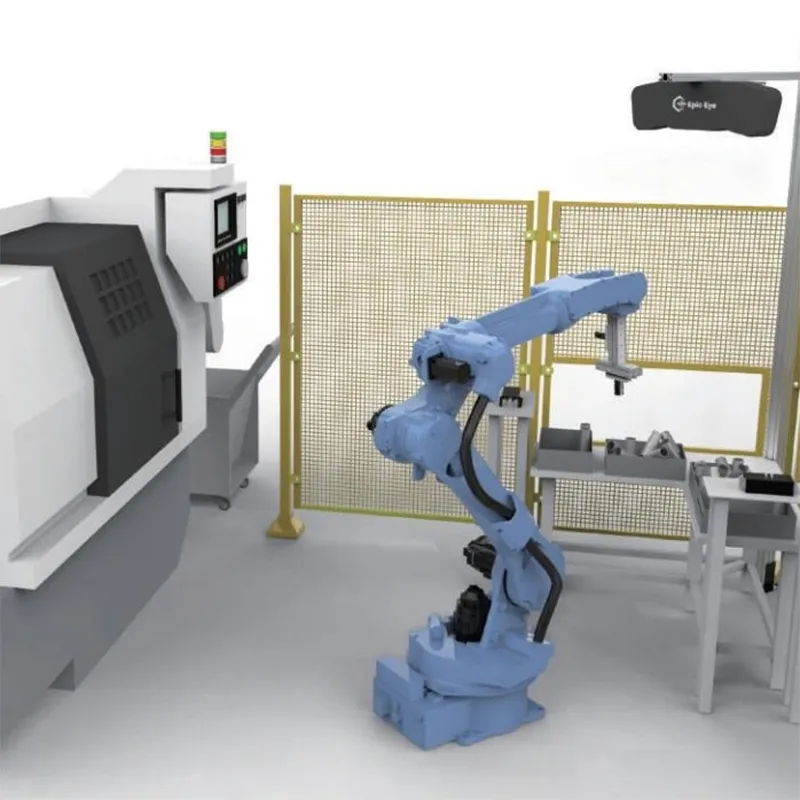
Другой пример – автоматизация подачи заготовок на станок. На первый взгляд, задача кажется простой. Но оказалось, что необходимо учитывать множество факторов: точность позиционирования, скорость подачи, необходимость защиты заготовок от повреждений. При использовании неподходящего оборудования и неправильных алгоритмов, наблюдались проблемы с качеством обработки и браком продукции. В итоге пришлось закупать более дорогостоящее, но более точное оборудование.
Перспективы и тенденции развития
Сейчас активно развиваются роботы-манипуляторы с 2D и 3D машинным зрением. Это позволяет им самостоятельно определять положение объектов и выполнять сложные задачи, такие как сборка, упаковка и сортировка. Появляются новые AGV и AMR (автономные мобильные роботы) с улучшенными характеристиками, такие как повышенная грузоподъемность, увеличенная скорость и улучшенная навигация. Также набирают популярность роботизированные системы подъёмно-транспортировки с использованием искусственного интеллекта (ИИ). Эти системы способны самостоятельно оптимизировать маршруты движения, предвидеть возможные сбои и адаптироваться к изменяющимся условиям производства. ООО ?Аньхой Мок Робототехника? активно работает над интеграцией ИИ в свои решения, чтобы предложить клиентам максимально эффективные и интеллектуальные системы автоматизации.
Заключение
В заключение хочется сказать, что внедрение высококачественного роботизированной подъёмно - транспортировки – это сложный, но перспективный процесс. Он требует тщательного планирования, профессионального подхода и постоянного контроля. Но если все сделать правильно, то автоматизация может существенно повысить эффективность производства, снизить затраты и улучшить качество продукции.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты








Связанный поиск
Связанный поиск- Контроль сварных швов и точек завод
- Ведущий алмазный шлифовальный круг черепашка
- Высококачественный аккумулятор для промышленных автономных тележек
- Высококачественный промышленные осветительные приборы
- Купить промышленные 2d-камеры
- Роботизированная загрузка поставщик
- Купить удлинитель для окрасочного пистолета
- Ведущий автоматическое погружное покрытие песчаных стержней
- Известный робот манипулятор kuka
- Ведущий плата привода промышленного робота