





Высококачественный роботизированная транспортировка и сортировка
Мы часто слышим про 'интеллектуальные склады' и 'автоматизацию производства', но как это выглядит на практике? Теория одна, реальность – совсем другая. Считается, что внедрение роботизированной транспортировки и сортировки – это просто установка роботов и все готово. Это, конечно, упрощение. Я лично столкнулся с множеством непредсказуемых моментов, от проблем с интеграцией до необходимости пересмотра логистических схем. Попытаюсь поделиться некоторыми наблюдениями, основанными на опыте работы с различными решениями в этой области.
От чего начинать: Анализ и планирование – основа успеха
Первый и самый важный шаг – это тщательный анализ текущих процессов. Нельзя просто взять и 'накинуть' автоматизацию на существующую систему. Нужно понять, где именно возникают 'узкие места', какие операции можно автоматизировать, и какой эффект это даст. Часто, у заказчиков возникает иллюзия, что автоматизация решит все проблемы. Но если процесс плохо спроектирован, роботы лишь усугубят существующие недостатки. Помню один проект, где внедрение AGV привело лишь к увеличению простоя из-за неправильно организованных маршрутов. Оказалось, что необходимо было пересмотреть схему размещения оборудования и оптимизировать логистику.
Второй момент – это выбор правильного решения. Существует огромное количество различных типов роботов и систем транспортировки. Например, для простых задач можно использовать конвейерные системы с автоматизированной сортировкой, а для более сложных – автономные мобильные роботы (AMR). Выбор зависит от конкретных потребностей и бюджета. Не стоит гнаться за самыми современными и дорогими решениями, если они не оправдывают себя. Важно найти оптимальное соотношение цены и качества.
Интеграция с существующими системами: не всегда просто
Интеграция новых систем роботизированной транспортировки и сортировки с уже существующей IT-инфраструктурой – это отдельная головная боль. Не все системы 'разговаривают' друг с другом. Например, нам приходилось разрабатывать собственные интерфейсы для интеграции роботов с существующей системой управления складом (WMS). Это требует определенных усилий и навыков программирования. Иногда возникает ситуация, когда необходимо использовать промежуточные платформы для обмена данными. Это может увеличить сложность и стоимость проекта.
Еще один момент – это вопросы безопасности. Роботы работают в непосредственной близости с людьми, поэтому необходимо обеспечить их безопасную эксплуатацию. Это включает в себя установку защитных ограждений, использование датчиков и систем предотвращения столкновений, а также обучение персонала правилам безопасной работы с роботами. Несоблюдение этих требований может привести к серьезным последствиям.
Проблемы с совместимостью EOAT (End-of-Arm Tooling)
Часто недооценивают сложность выбора и настройки концевых инструментов (EOAT) для роботов. Например, мы сталкивались с ситуацией, когда выбранный EOAT для захвата нестандартных деталей оказался неэффективным. Пришлось разрабатывать специальный инструмент под конкретную задачу. Это требует определенных знаний и опыта. Важно учитывать вес и размеры деталей, а также скорость и точность захвата. По сути, EOAT – это 'рука' робота, и от ее качества напрямую зависит эффективность всей системы.
Выбор EOAT – это не просто покупка инструмента, это инженерная задача. Нужно учитывать материал деталей, их форму, требуемую точность и скорость обработки. Неправильно подобранный EOAT может привести к повреждению деталей, задержкам в производственном процессе и дополнительным затратам.
Примеры из практики: успех и неудачи
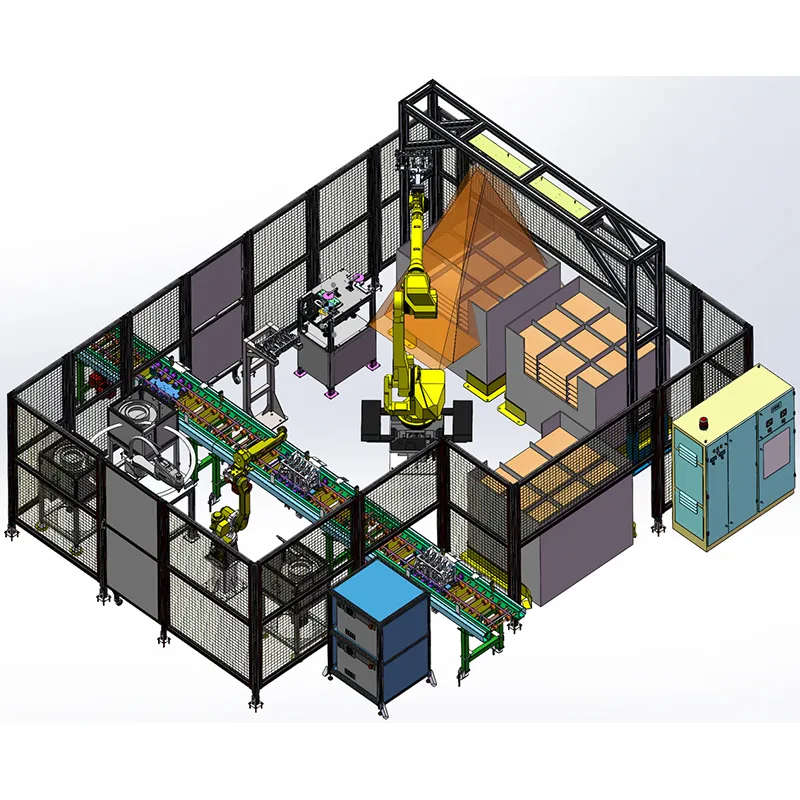
В одном из проектов мы внедрили автоматизированную систему транспортировки и сортировки на складе с высокой пропускной способностью. Мы использовали комбинацию конвейерных систем, роботов-манипуляторов и AMR. В результате удалось сократить время обработки заказов на 40% и снизить количество ошибок при комплектации. Это был очень успешный проект, который позволил заказчику значительно повысить эффективность работы склада.
Но были и неудачи. В другом проекте мы попытались внедрить роботизированную систему сортировки для мелких деталей. Однако, из-за высокой вариативности размеров и форм деталей, роботы постоянно допускали ошибки. Пришлось отказаться от этой идеи и вернуться к ручной сортировке. Это показывает, что не все задачи можно автоматизировать. Необходимо реалистично оценивать возможности робототехники и не переоценивать ее эффективность.
Перспективы развития: будущее за гибкостью и адаптивностью
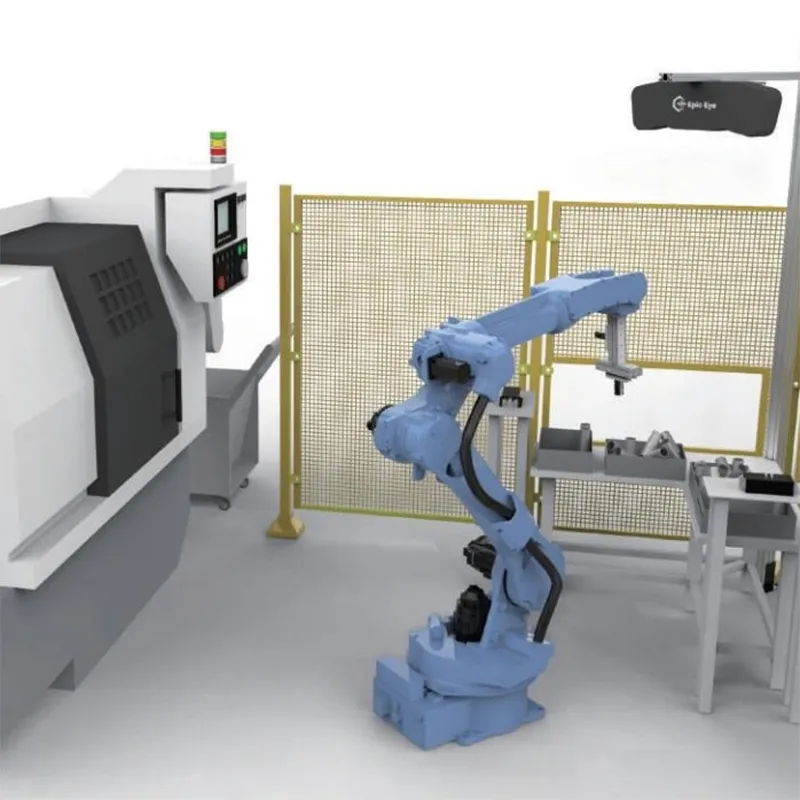
Сейчас наблюдается тенденция к развитию гибких и адаптивных систем роботизированной транспортировки и сортировки. Это означает, что роботы могут легко перенастраиваться для выполнения различных задач. Также активно развивается направление коллаборативной робототехники (коботы), которые могут работать совместно с людьми, повышая их производительность и безопасность. Использование 2D/3D систем машинного зрения позволяет роботам распознавать и захватывать детали с высокой точностью.
В будущем автоматизация транспортировки и сортировки станет еще более распространенной и доступной. Это потребует от специалистов новых знаний и навыков. Важно постоянно следить за новыми технологиями и тенденциями в этой области, чтобы не отставать от прогресса. И помнить, что успешное внедрение автоматизации – это не просто установка роботов, а комплексный проект, который требует тщательного планирования, интеграции и обслуживания.
Соответствующая продукция
Соответствующая продукция







Самые продаваемые продукты
Самые продаваемые продукты







Связанный поиск
Связанный поиск- Известный роботы estun
- Известный платформа для обучения системе роботизированной сборки
- Ведущий шлифовальные шпиндели
- Купить промышленные 2d-камеры
- Роботизированный шлифование завод
- Купить дозирующий шарик для стиральной машины
- Ведущий соединитель кабельных стоек
- Программное обеспечение цифрового двойника
- Известный дозирующий шарик для стиральной машины
- Гидравлический маслопровод