





Известный роботизированная подъёмно - транспортировка
Итак, роботизированная подъёмно - транспортировка. На первый взгляд – простая вещь. Перемещение грузов с места на место с помощью робота. Но на практике все гораздо сложнее. Часто за этим стоит целая инфраструктура, алгоритмы, интеграция с существующим оборудованием. Многие компании, особенно начинающие, подходят к этой задаче слишком упрощенно. Делают ставку на готовые решения, не учитывая специфику производства и особенности загрузки. Это, как правило, приводит к разочарованиям и необходимости переделки, что, естественно, увеличивает стоимость проекта. В этой статье я хочу поделиться своим опытом, ошибками и наблюдениями, которые, надеюсь, помогут избежать подобных проблем.
От теоретических концепций к практическим задачам
В теории, автоматизация подъёмно - транспортировочных систем – это благо. Повышение производительности, снижение трудозатрат, минимизация ошибок. И это правда. Но теория – одно, а практика – совсем другое. Возьмем, к примеру, задачу перемещения деталей между станками в цехе. Казалось бы, все просто: установил робота, запрограммировал маршрут. Но что если детали имеют нестандартную форму? Что если вес деталей сильно варьируется? Что если нужно обеспечить высокую точность и аккуратность при перемещении? Или, что еще важнее – как интегрировать робота в существующий производственный цикл, не останавливая при этом всю линию? Эти вопросы часто остаются без должного внимания, что, как правило, приводит к задержкам и перерасходу бюджета.
Мы столкнулись с подобной ситуацией в одной из компаний, специализирующихся на изготовлении сложного промышленного оборудования. Они хотели автоматизировать процесс перемещения крупных компонентов между несколькими производственными участками. Изначально планировали использовать универсальный робот с захватом, но быстро поняли, что это неэффективно. Разные компоненты имели разную форму и вес, что требовало постоянной перенастройки программы. В итоге, пришлось заказать специализированный захват для каждого типа компонента, что значительно увеличило стоимость и время реализации проекта. Это урок, который мы усвоили на собственном опыте: нужно тщательно анализировать все особенности груза и выбирать оптимальное решение для его перемещения.
Захваты и манипуляторы: выбор правильного инструмента
Не стоит недооценивать важность выбора правильного захвата или манипулятора для робота. Это не просто инструмент для удержания груза – это ключевой элемент, определяющий эффективность и надежность всей системы. Существует огромное количество различных типов захватов: вакуумные, механические, магнитные, с пневматическим приводом и т.д. Выбор зависит от формы, веса и материала груза, а также от требований к точности и скорости перемещения. Неправильно подобранный захват может привести к повреждению груза, заклиниванию робота и даже к аварийной ситуации.
Мы работали с компанией, которая пыталась использовать универсальный вакуумный захват для перемещения листов металла. Результат был плачевным: захват часто терял вакуум, листы скользили, возникали царапины и вмятины. Пришлось заказать специализированные захваты с несколькими вакуумными камерами и дополнительной системой стабилизации. Это не только повысило надежность системы, но и снизило риск повреждения груза. Вот где именно нужен опытный инженер, который сможет оценить все факторы и подобрать оптимальное решение.
Интеграция с существующим оборудованием: ключ к бесперебойной работе
Интеграция роботизированных подъёмно - транспортировочных систем с существующим оборудованием – это отдельная сложная задача. Необходимо учитывать множество факторов: наличие коммуникаций, совместимость протоколов, требования к безопасности. Часто возникает необходимость в разработке специализированного программного обеспечения для интеграции робота с существующей системой управления производством (MES или ERP). Без этого интеграция может быть неполной или некорректной, что приведет к сбоям в работе и снижению эффективности.
В одной из наших компаний мы столкнулись с проблемой интеграции робота с существующей системой управления станками с ЧПУ. Оказалось, что протоколы связи робота и станков не совместимы. Пришлось разработать специализированный мост, который обеспечивал обмен данными между роботом и станками. Это был трудоемкий процесс, но он позволил нам полностью автоматизировать процесс перемещения деталей между станками и повысить производительность на 20%. Необходимо учитывать, что часто не хватает 'мостов' между старым и новым оборудованием, а разработка этих самых 'мостов' – это дорогостоящий процесс.
AGV/AMR: автономная мобильность для гибких производств
В последние годы все большую популярность приобретают автономные мобильные роботы (AMR) и автоматизированные мобильные транспортные средства (AGV) для подъёмно - транспортировочных задач. Эти системы позволяют создавать гибкие и адаптивные производственные линии, которые могут быстро перестраиваться в зависимости от текущих потребностей. AMR/AGV могут самостоятельно перемещаться по цеху, обходя препятствия и избегая столкновений, что значительно упрощает логистику и повышает эффективность.
Мы реализовали проект по автоматизации доставки материалов на складской территории с использованием AMR. Благодаря автономности этих роботов, мы смогли оптимизировать логистику склада, сократить время на поиск и доставку материалов и снизить риск ошибок при транспортировке. Важно помнить, что для эффективной работы AMR/AGV необходимо обеспечить наличие четкой карты склада и систему управления трафиком, чтобы избежать столкновений и обеспечить бесперебойную работу.
Проблемы и вызовы: что нужно учитывать при внедрении
Внедрение роботизированных подъёмно - транспортировочных систем – это не просто покупка робота и установка его на производство. Это комплексный процесс, который требует тщательного планирования, подготовки и контроля. Существует множество проблем и вызовов, с которыми можно столкнуться: высокая стоимость внедрения, необходимость обучения персонала, сложность интеграции с существующим оборудованием, риски безопасности, необходимость обслуживания и ремонта. Важно заранее учитывать все эти факторы и разработать план действий по их решению.
Мы неоднократно сталкивались с ситуациями, когда компании недооценивали сложность внедрения роботов и не были готовы к затратам на обучение персонала и обслуживание оборудования. Это приводило к задержкам в реализации проекта и перерасходу бюджета. Важно помнить, что роботы – это не волшебная палочка, которая решит все проблемы. Они – всего лишь инструмент, который может повысить эффективность производства, но только при правильном использовании.
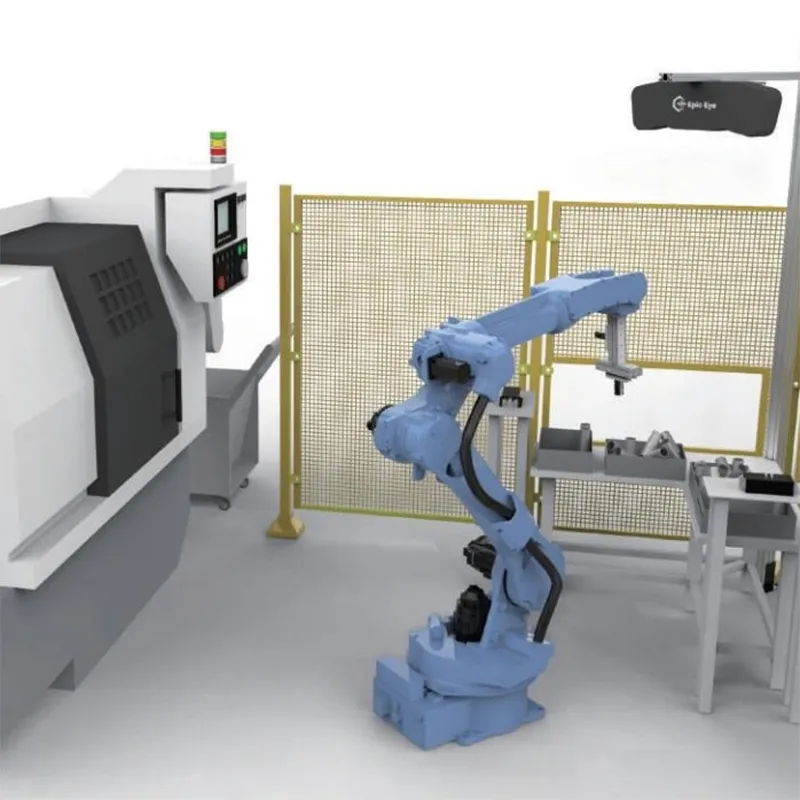
Безопасность: приоритет номер один
Безопасность – это один из самых важных аспектов при внедрении роботизированных подъёмно - транспортировочных систем. Роботы работают в непосредственной близости с людьми, поэтому необходимо обеспечить их безопасную работу. Это включает в себя установку ограждений, датчиков, систем аварийной остановки и обучение персонала правилам безопасной работы с роботами. Необходимо строго соблюдать все требования безопасности и регулярно проводить проверки оборудования.
Однажды у нас произошел инцидент, когда сотрудник случайно оказался в зоне работы робота. К счастью, система аварийной остановки сработала вовремя, и никто не пострадал. Но этот инцидент показал нам, насколько важно соблюдать правила безопасности и не пренебрегать мерами предосторожности. Безопасность – это не просто формальность, это вопрос жизни и здоровья людей.
Заключение: будущее автоматизации подъёмно - транспортировки
Роботизированная подъёмно - транспортировка – это перспективное направление, которое может значительно повысить эффективность производства. Но для успешного внедрения необходимо учитывать множество факторов, планировать все этапы проекта, подбирать оптимальное решение для конкретной задачи и уделять особое внимание безопасности. В будущем нас ждет дальнейшее развитие этой технологии, появление новых типов роботов и систем управления, повышение их автономности и интеллектуальности. Но главное – помнить, что роботы – это инструмент, который должен помогать людям, а не заменять их.
ООО ?Аньхой Мок Робототехника? активно следит за тенденциями в области робототехники и предлагает комплексные решения для автоматизации подъёмно - транспортировочных процессов. Наш опыт и экспертиза помогут вам выбрать
Соответствующая продукция
Соответствующая продукция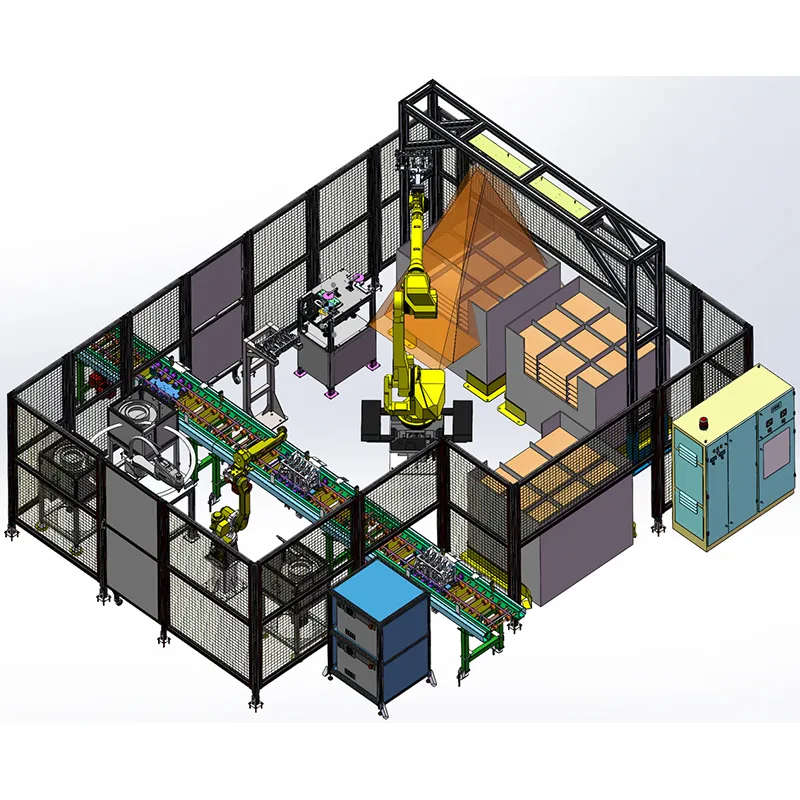








Самые продаваемые продукты
Самые продаваемые продукты









Связанный поиск
Связанный поиск- Ведущий роликовый конвейер
- Роботы efort поставщик
- Ведущий комплект кабельный соединитель
- Известный автоматические считыватели кодов
- Программируемые логические контроллеры плк
- Клапан смены цвета краски
- Купить промышленный объектив для машинного зрения
- Модуль перемещения с приводом поставщик
- Купить роботы abb
- Ведущий визуальный контроль роботом