





Известный роботизированное извлечение отливок из стержневых машин с помощью робота
Известный роботизированное извлечение отливок из стержневых машин с помощью робота – звучит как из области фантастики, но на самом деле это уже реальность, хотя и с немалым количеством нюансов. Часто в разговорах об автоматизации литейного производства акцент делается на роботизированной покраске или сборке. Но, поверьте, эффективное и безопасное извлечение готовых отливок из стержневых машин – это отдельная и не менее сложная задача. Мы в ООО ?Аньхой Мок Робототехника? ежедневно сталкиваемся с этим, и я хотел бы поделиться своими мыслями и опытом.
Почему извлечение отливок – это проблема?
Проблема, как мне кажется, в сочетании нескольких факторов. Во-первых, вес отливки. Стержневые машины часто работают с весьма массивными деталями. Во-вторых, необходимость высокой точности и аккуратности, чтобы не повредить поверхность отливки. Любая царапина или скол может потребовать дорогостоящей переработки. В-третьих, динамика процесса – извлечение происходит быстро, часто в условиях высокой температуры, что требует от робота не только силы, но и высокой скорости реакции и надежности.
Мы видели примеры, когда дешевые решения, использующие стандартные манипуляторы, приводили к серьезным проблемам. Слишком много вибраций, неадекватная захватная система, и вот уже отливка падает с высоты, требуя ручной переработки или даже полной утилизации. Это не только убытки, но и ухудшение безопасности труда.
Разбираем захватную систему: ключ к успеху
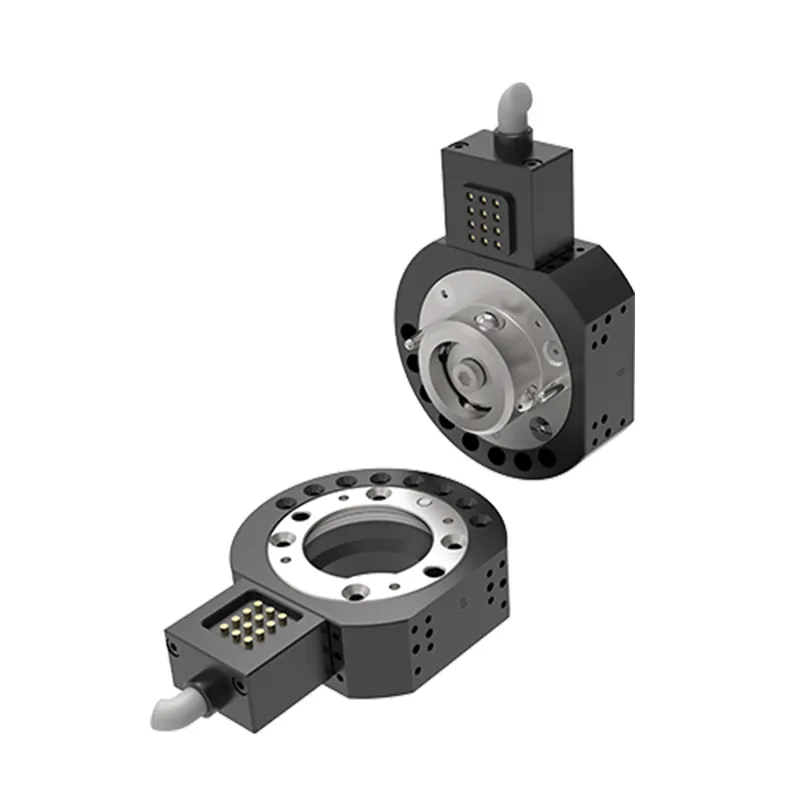
Первое, на что стоит обратить внимание – это захватная система. Обычные клешни здесь не всегда подходят. Нужны решения, которые обеспечивают надежный и равномерный захват, не деформируя отливку. Мы в своей работе используем различные типы захватных устройств, от пневматических до электромагнитных, в зависимости от материала отливки и требуемой точности. Ключевой момент – адаптивность. Захватная система должна быть способна автоматически подстраиваться под различные размеры и формы отливок, а также учитывать возможное наличие остатков стержня или других загрязнений.
Реальный кейс: недавно мы автоматизировали процесс извлечения отливок для одного из наших партнеров, производящих детали для автомобильной промышленности. Изначально они использовали простую механическую клешню, которая периодически срывалась, повреждая детали. После замены на электромагнитный захват с регулируемым усилием, проблемы практически исчезли. Это позволило нам значительно повысить производительность и снизить количество брака.
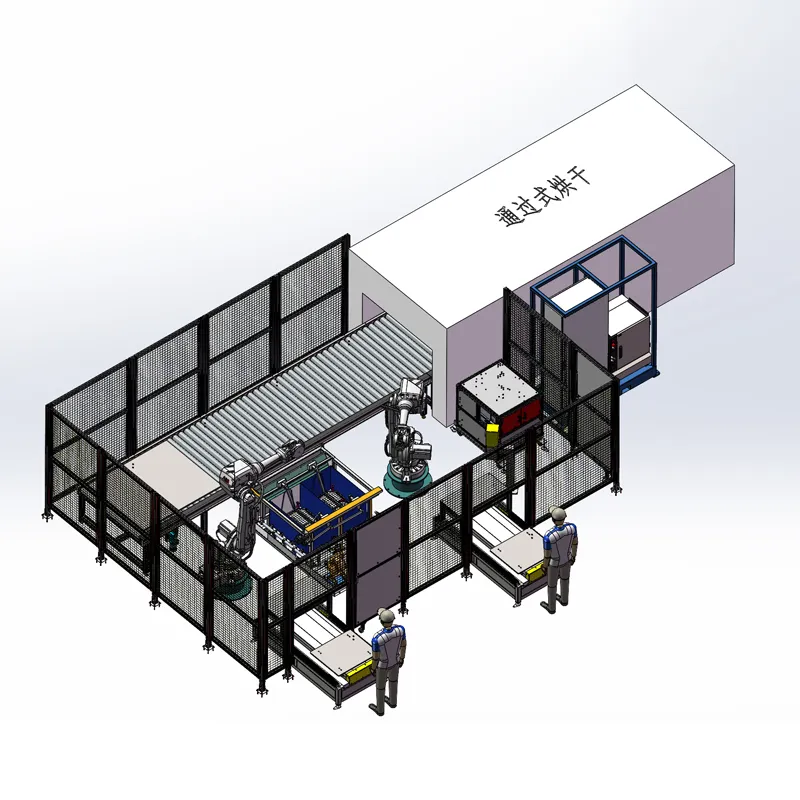
Робототехнический комплекс: интеграция и настройка
Дальше – интеграция робота в существующий производственный процесс. Это сложный этап, требующий тщательного планирования и инженерных решений. Необходимо учитывать рабочее пространство робота, наличие препятствий, а также требования к безопасности. Часто приходится модифицировать существующие конвейерные линии или даже проектировать новые. Это может потребовать привлечения специалистов по автоматизации, а также использование специализированного программного обеспечения для моделирования и оптимизации движения робота.
Мы часто сталкиваемся с проблемой синхронизации движения робота с работой стержневой машины. Нужно точно определить момент извлечения отливки и обеспечить плавный переход между режимами работы. Ошибки в этом плане могут привести к столкновениям или повреждению оборудования. Поэтому интеграция – это не просто установка робота, это глубокая адаптация всех систем.
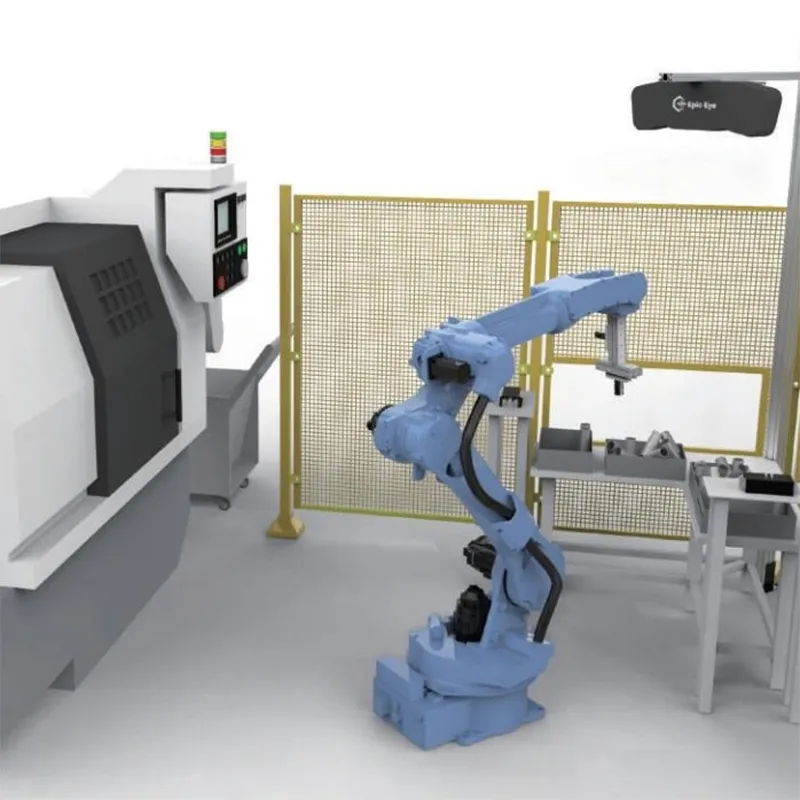
Системы машинного зрения: контроль качества и безопасности
Использование систем машинного зрения – это не просто модный тренд, это необходимость. МСВ позволяет контролировать процесс извлечения, определять наличие дефектов на поверхности отливки, а также предотвращать столкновения с оборудованием или другими объектами. Мы интегрируем 2D/3D системы машинного зрения в наши решения, чтобы обеспечить максимальную безопасность и контроль качества.
Например, с помощью МСВ можно автоматически отслеживать положение отливки и корректировать траекторию движения робота. Это особенно важно при работе с нестандартными формами или при наличии вибраций. Кроме того, МСВ может использоваться для автоматической сортировки отливок по качеству, выбраковывая дефектные детали и направляя их на переработку. И это позволяет нам предлагать нашим клиентам комплексные решения, охватывающие все этапы производственного процесса.
Ошибки и уроки: о чем стоит помнить
Не хочу приукрашивать действительность – не все идет гладко. Мы сталкивались с ситуациями, когда недооценка сложности захвата отливок приводила к постоянным поломкам и простоям. Или когда недостаточная квалификация операторов робота приводила к ошибкам в работе и повреждению оборудования. Главный урок – подходить к решению каждой задачи комплексно, учитывая все факторы и особенности конкретного производственного процесса. И не экономить на обучении персонала.
Помните, успешная автоматизация – это не просто установка робота, это инвестиции в будущее вашего производства. И в долгосрочной перспективе, эти инвестиции окупаются сторицей.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты











Связанный поиск
Связанный поиск- Дверные замки безопасности оборудования
- Купить устройство смены инструмента
- Высококачественный роботы efort
- Ведущий мост автомобильный роботизированная шлифовка
- Запчасти для промышленных роботов
- Автоматизированное полирование заводы
- Высококачественный смоляные шлифовальные круги
- Купить автоматический шланг для подачи клея
- Купить регулятор давления для краскопульта
- Ведущий обучение работе с промышленными роботами