





Известный устройство смены инструмента
Итак, известный устройство смены инструмента… Что это вообще такое? Часто в теории все выглядит просто: автоматическая, быстрая, надежная смена инструмента робота – и вот, производственный процесс идет без остановок. Но на практике… Тут сразу возникает куча нюансов. Всегда казалось, что это должно быть чем-то само собой разумеющимся, да и в документации у многих производителей это преподносят как базовую функцию. Однако, реальный опыт работы с разными системами показывает, что 'известность' не всегда означает 'простота'. На мой взгляд, большое заблуждение – это считать, что существует универсальное решение, подходящее абсолютно для всех задач. И, честно говоря, я до сих пор нахожусь в постоянном поиске оптимального подхода к каждому конкретному случаю.
Проблемы интеграции и совместимости
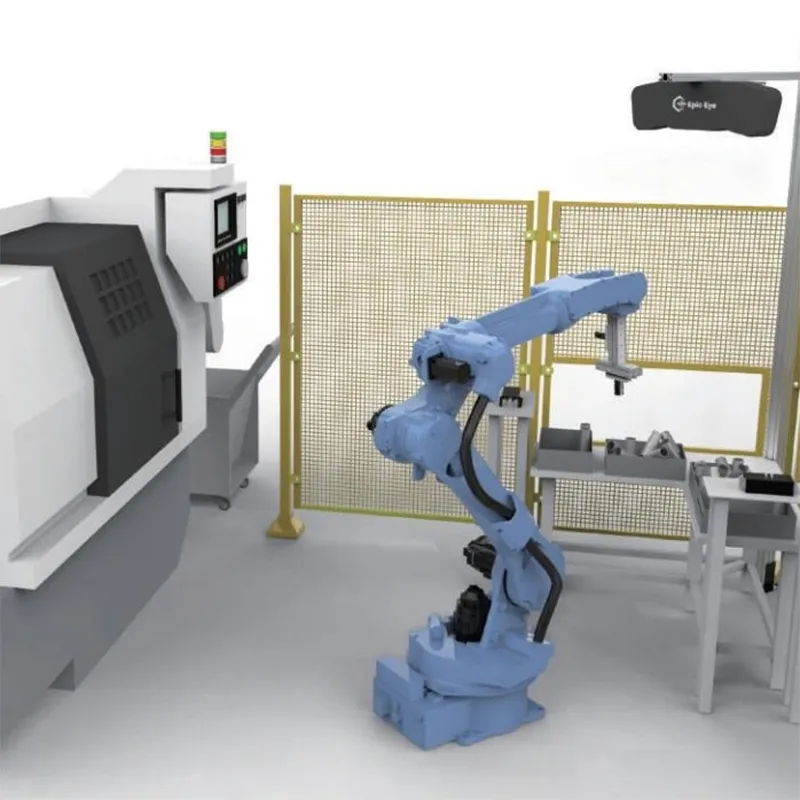
Первая и, пожалуй, самая распространенная проблема – это интеграция с существующим оборудованием. У нас, например, часто встречаются ситуации, когда устройство смены инструмента просто не 'подружалось' с конкретным роботом или с его контроллером. Несовместимость протоколов, различия в интерфейсах, неправильная настройка – список потенциальных проблем длинный. Мы работали с несколькими системами, основанными на различных принципах: от механических схватов до электромагнитных приводов. И в каждой из них встречались свои особенности. Недавно, при внедрении системы на предприятии, где уже использовались роботы ABB, возникли сложности с интеграцией EOAT (End-of-Arm Tooling). Оказалось, что стандартные драйверы не поддерживают специфические параметры, которые требовались для работы с нашими захватами. Пришлось писать кастомный код, чтобы обеспечить корректную передачу данных. Это, конечно, увеличило сроки и бюджет проекта.
И не только робот. Ключевой момент – это совместимость с системами зрения. Если смена инструмента требует высокой точности позиционирования, то нужно обеспечить качественное и надежное определение положения инструмента и его правильное подсоединение. Некачественное изображение, неправильная калибровка, недостаточная скорость обработки – всё это может привести к ошибкам и простоям.
Типы устройств смены инструмента: обзор и сравнение
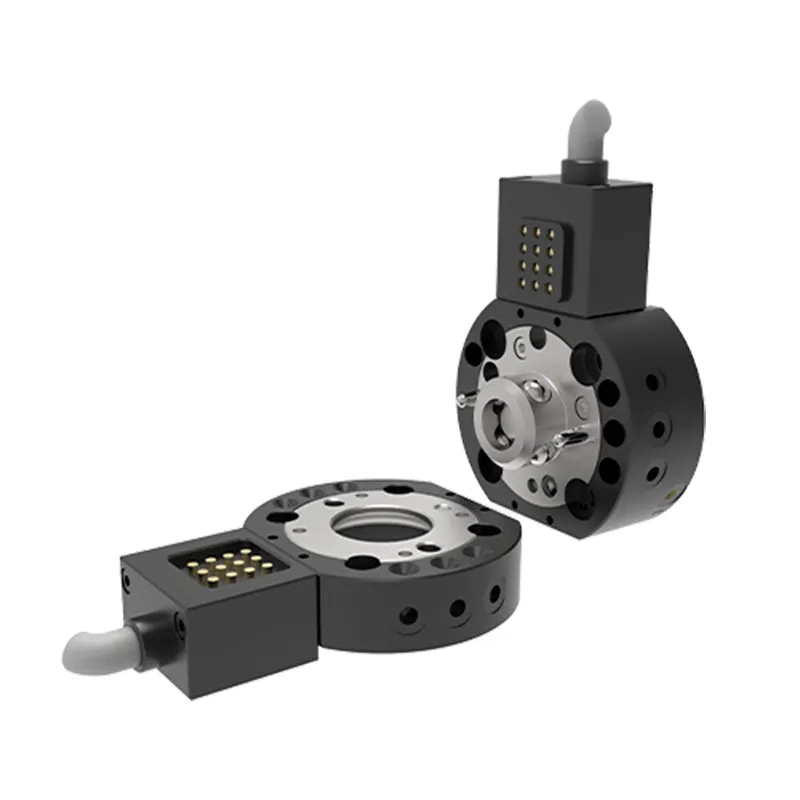
На рынке представлено множество различных типов устройств смены инструмента. Если говорить упрощенно, то можно выделить несколько основных категорий. Первый – это механические системы, использующие шарнирные или захватные механизмы. Они обычно довольно простые в конструкции и относительно недорогие, но могут быть не очень надежными при интенсивной эксплуатации. Второй вариант – это электромагнитные системы. Они обеспечивают более плавную и контролируемую смену инструмента, но и стоят дороже. И, наконец, более современные – гидравлические или пневматические системы, которые позволяют быстро и эффективно менять инструменты большого размера или сложной формы. Каждый тип имеет свои плюсы и минусы, и выбор зависит от конкретных требований к производительности, точности и надежности.
Важно понимать, что не существует 'лучшего' решения. Выбор устройства смены инструмента – это всегда компромисс между стоимостью, производительностью и надежностью. Например, если требуется смена инструментов очень часто и с высокой скоростью, то, возможно, стоит выбрать более дорогую, но надежную и быструю систему. А если требования не столь высоки, то можно обойтись более простой и дешевой конструкцией.
Реальный кейс: автоматизация линии по сборке электроники
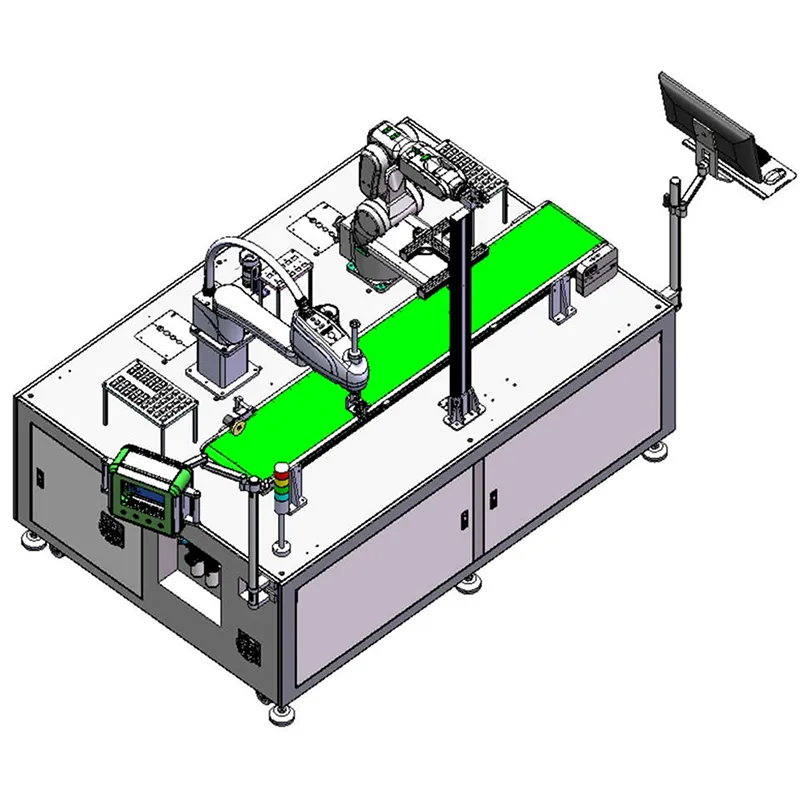
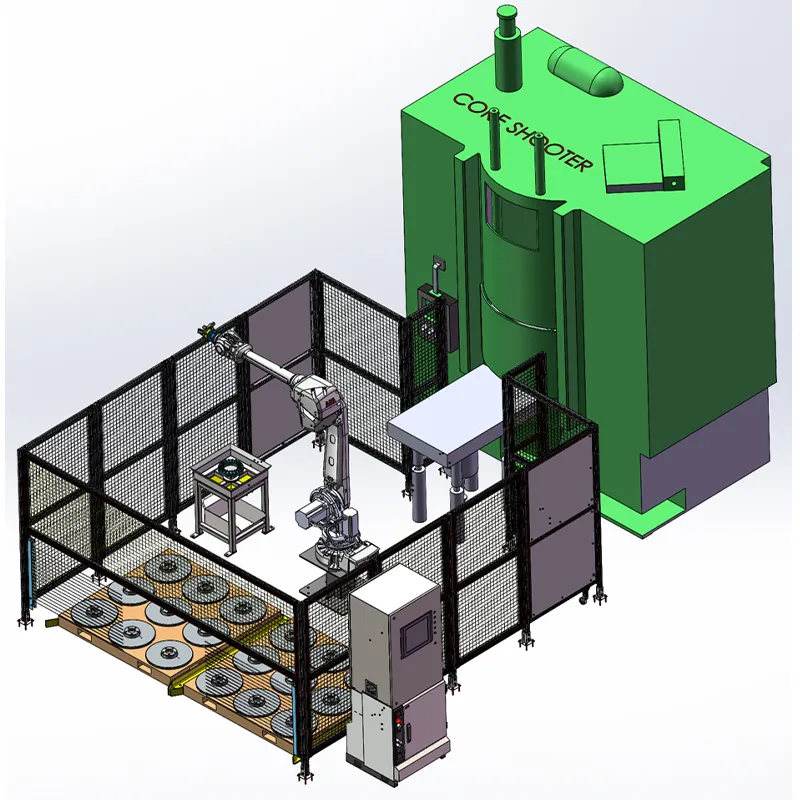
Недавно мы участвовали в проекте по автоматизации линии по сборке электроники. Требования к процессу были очень высокими – высокая производительность, точность и минимальное количество ошибок. Было решено использовать робота для выполнения операций по сборке и смене инструмента. После тщательного анализа требований и оценки различных вариантов, мы выбрали систему смены инструмента на основе электромагнитных принципов. Это позволило нам обеспечить плавную и контролируемую смену инструментов, что критически важно для точной сборки электронных компонентов. В процессе интеграции мы столкнулись с проблемой вибрации, которая влияла на точность позиционирования. Для решения этой проблемы пришлось использовать специальные демпфирующие элементы и оптимизировать алгоритмы управления роботом.
Использование устройства смены инструмента в данном случае значительно повысило производительность и точность линии сборки. Кроме того, оно позволило нам уменьшить количество ошибок и повысить качество продукции. Но, как всегда, не обошлось без трудностей. Потребовалось время на отладку и оптимизацию системы, но в итоге мы добились отличных результатов. И, я уверен, это лишь один из множества примеров успешного внедрения устройств смены инструмента в современных производственных процессах. Если компания ищет решение, которое позволит повысить эффективность и гибкость производства, то автоматизация с помощью роботов и устройств смены инструмента – это вполне перспективный путь.
Проблемы с износом и обслуживание
Очень часто недооценивают вопрос обслуживания и износа. Любая механическая система, включая устройство смены инструмента, нуждается в регулярном техническом обслуживании и периодической замене изношенных деталей. Игнорирование этих требований может привести к снижению надежности системы, увеличению времени простоя и, в конечном итоге, к серьезным проблемам.
Мы, в своей работе, всегда уделяем большое внимание вопросам технического обслуживания. Разрабатываем графики планового обслуживания, проводим диагностику системы и своевременно заменяем изношенные детали. Это позволяет нам поддерживать работоспособность системы на высоком уровне и предотвращать неожиданные поломки. Также, важно правильно подобрать смазочные материалы и обеспечить чистоту рабочей зоны. Это значительно увеличивает срок службы устройства смены инструмента и снижает затраты на его обслуживание.
В конечном счете, известный устройство смены инструмента – это не просто аппаратное обеспечение, а важный элемент производственной системы, который требует комплексного подхода к внедрению, интеграции и обслуживанию. И только при правильном подходе можно добиться максимальной эффективности и надежности.
Соответствующая продукция
Соответствующая продукция








Самые продаваемые продукты
Самые продаваемые продукты







Связанный поиск
Связанный поиск- Купить роботы estun
- Плк
- Известный дозирующая машина для полиуретана
- Высококачественный роботизированная окрасочная станция
- Ведущий автоматизированная шлифовка стальных отливок
- Ведущий смесители двухкомпонентных материалов
- Ведущий роботизированная шлифовка головки блока цилиндров двигателя
- Ведущий бесщеточный модуль привода
- Купить промышленные 2d-камеры
- Известный автоматический шланг для подачи клея