





Контроль дефектов роботом заводы
Начать стоит с того, что часто слышишь о полной автоматизации контроля качества на заводах, как о серебряной пуле. Идеально, конечно, но как всегда, реальность оказывается сложнее. В моей практике, как у инженера-автомата с 15-летним стажем, полноценная замена человека в этой сфере – это не просто внедрение камеры и алгоритма. Это комплексный процесс, включающий выбор подходящей технологии, адаптацию к специфике производства и, что немаловажно, постоянную доработку и поддержку. Сегодня разберем, какие технологии используются для контроля дефектов роботом заводы, с какими трудностями сталкиваются и какие решения позволяют добиться действительно эффективного результата.
Почему автоматизация контроля качества так актуальна?
Причин несколько. Во-первых, увеличение объемов производства диктует необходимость ускорения процессов. Человеческий фактор неизбежно вносит погрешности, а робот работает стабильно и быстро, не устает и не отвлекается. Во-вторых, повышение требований к качеству продукции. Современные стандарты требуют более точного и всестороннего контроля, что часто невозможно обеспечить визуальным осмотром. Ну и, конечно, снижение затрат. Да, первоначальные инвестиции в роботизированную систему контроля могут быть значительными, но в долгосрочной перспективе они окупаются за счет снижения количества брака и повышения производительности.
Мы в ООО ?Аньхой Мок Робототехника? постоянно работаем над тем, чтобы предлагать наиболее эффективные решения для наших клиентов. Мы убеждены, что автоматизация контроля качества – это не просто тренд, это необходимость для предприятий, стремящихся к лидерству на рынке. Наш опыт работы с различными производственными процессами позволяет нам подобрать оптимальную конфигурацию системы, учитывая все особенности конкретного производства.
Визуальный контроль: от простого к сложному
На начальном этапе автоматизации часто используют системы визуального контроля. Они основаны на анализе изображений, полученных с камер. Простые системы определяют наличие или отсутствие дефекта (например, царапины, трещин, загрязнений). Более сложные системы используют алгоритмы машинного зрения для более детального анализа – определяют размеры дефекта, его форму, цвет, а иногда даже выявляют скрытые дефекты, которые не видны невооруженным глазом.
На практике, часто возникают сложности с настройкой таких систем. Качество изображений зависит от многих факторов: освещения, углов обзора, положение деталей. Кроме того, алгоритмы машинного зрения требуют обучения на большом количестве примеров – с фотографиями как дефектных, так и нормальных деталей. Например, при работе с сложной геометрией деталей, а также с динамическими процессами (например, при сварке), настройка может занять значительное время и потребовать больших усилий.
Специфические задачи: контроль геометрии и размеров
Визуальный контроль – это лишь часть картины. Для контроля геометрии и размеров деталей используются различные сенсоры: датчики продольного перемещения, датчики радиального перемещения, координатно-измерительные машины (КИМ). Эти системы позволяют точно измерять размеры деталей и сравнивать их с заданными значениями. Причем, измерения могут проводиться в режиме реального времени, что позволяет оперативно выявлять отклонения от нормы.
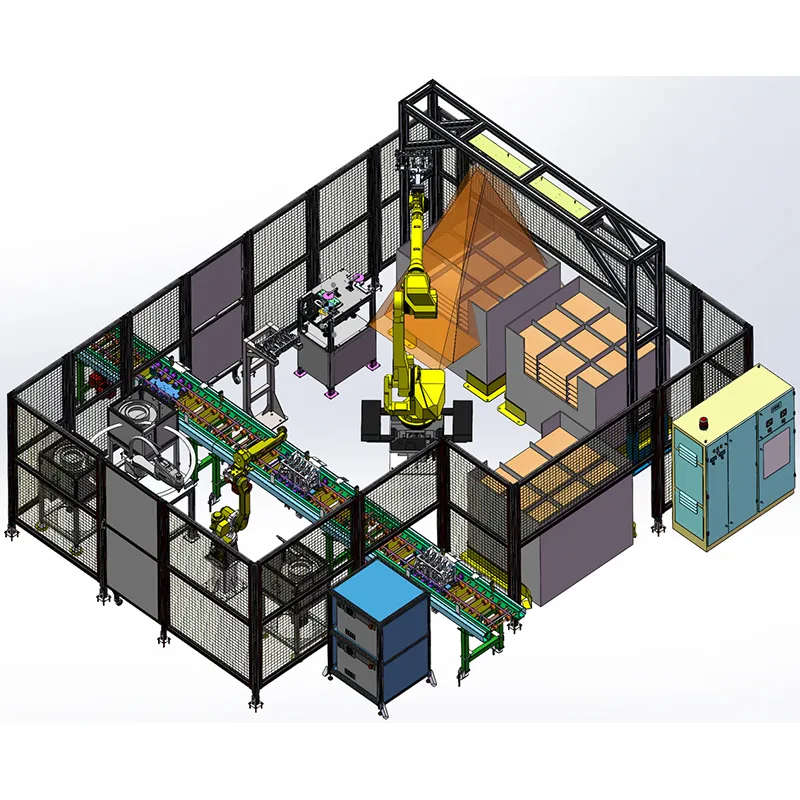
В одной из наших разработок для автомобильной промышленности, мы использовали систему на основе 3D-сканирования и алгоритмов машинного зрения для контроля размеров сложных деталей кузова. В предыдущих проектах использовались только КИМы, что требовало временной остановки производства для проведения измерений. Но с нашей системой контроль стал непрерывным и не влиял на рабочий процесс. Это значительно повысило производительность и качество.
Проблемы с сочленениями и труднодоступными местами
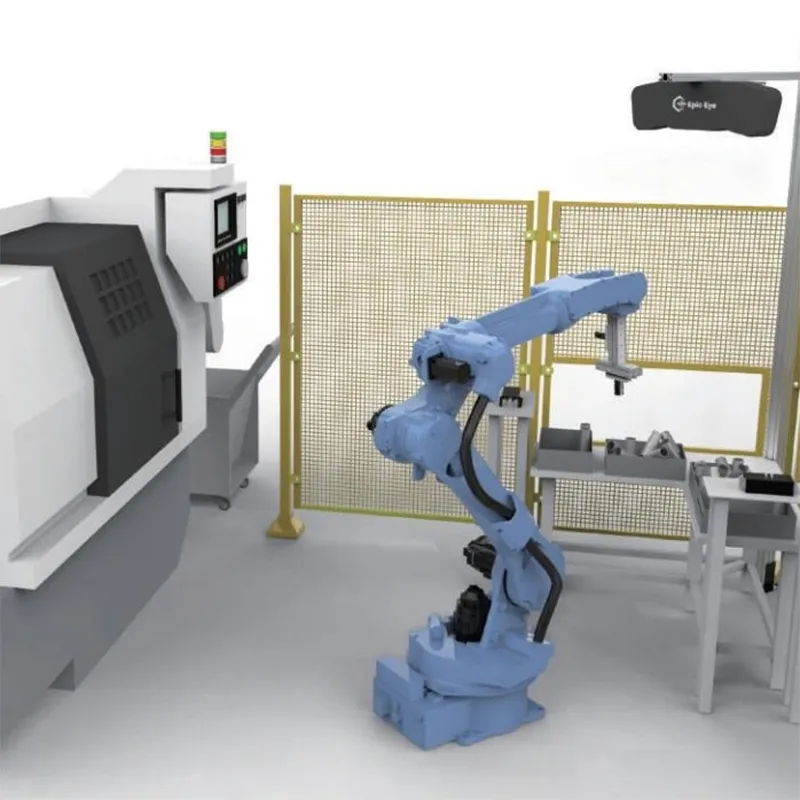
Одной из самых сложных задач является контроль деталей с сочленениями и труднодоступными местами. Там, где сложно установить камеры или датчики, приходится использовать более сложные решения, такие как роботизированные манипуляторы с различными типами концевых инструментов. Например, мы успешно применяли системы контроля с использованием 3D-сканеров и манипуляторов для контроля сварных швов. Манипулятор перемещается по поверхности детали, сканируя ее и выявляя дефекты сварки.
Стоит отметить, что такие системы требуют высокой точности позиционирования и контроля. Любая ошибка в координатах может привести к неверным измерениям или пропуску дефекта. Поэтому, важно использовать качественное оборудование и программное обеспечение, а также проводить регулярную калибровку системы.
Использование машинного зрения для контроля поверхностных дефектов
Машинное зрение сейчас используется для обнаружения самых разных поверхностных дефектов: от царапин и трещин до сколов и загрязнений. Алгоритмы могут быть обучены на распознавание специфических типов дефектов, что позволяет достичь высокой точности и надежности контроля. Например, можно настроить систему на поиск микротрещин на металлических поверхностях или на выявление дефектов покрытия.
Особое внимание уделяется адаптации алгоритмов к различным условиям освещения и углам обзора. Специальные световые приборы и камеры с широким динамическим диапазоном позволяют добиться хорошего качества изображений даже в сложных условиях. В нашей практике, мы часто используем комбинацию различных камер и световых приборов для оптимизации работы системы.
Обучение алгоритмов: ключ к успеху
Важный аспект использования машинного зрения – это обучение алгоритмов. Для этого требуется большой набор данных, включающий фотографии как дефектных, так и нормальных деталей. Чем больше данных, тем точнее будут работать алгоритмы. Мы используем различные методы обучения: supervised learning (обучение с учителем), unsupervised learning (обучение без учителя) и reinforcement learning (обучение с подкреплением). Выбор метода зависит от конкретной задачи и доступности данных.
Процесс обучения алгоритмов может быть довольно трудоемким и требовать специализированных знаний и навыков. Необходимо правильно подготовить данные, выбрать подходящий алгоритм и настроить его параметры. Мы оказываем полный спектр услуг по обучению алгоритмов, от сбора данных до развертывания системы.
Будущее автоматизированного контроля качества
Сейчас активно развиваются новые технологии, которые могут значительно улучшить автоматизированный контроль качества. Это, в первую очередь, использование искусственного интеллекта (ИИ) и глубокого обучения (Deep Learning). Эти технологии позволяют создавать более сложные и интеллектуальные системы контроля, которые могут самостоятельно адаптироваться к изменяющимся условиям производства и выявлять новые типы дефектов.
Кроме того, развиваются технологии 3D-сканирования и визуализации, которые позволяют получать более детальную информацию о деталях и выявлять скрытые дефекты. Например, используются методы томографии и рентгенографии для контроля внутренней структуры деталей. Использование этих технологий позволяет добиться максимальной точности и надежности контроля.
Мы в ООО ?Аньхой Мок Робототехника? постоянно следим за новыми тенденциями в области автоматизированного контроля качества и разрабатываем новые решения, которые помогают нашим клиентам повышать качество продукции и снижать затраты.
Соответствующая продукция
Соответствующая продукция







Самые продаваемые продукты
Самые продаваемые продукты







Связанный поиск
Связанный поиск- Купить роботы fanuc
- Высококачественный paint regulators
- Роботизированная подъёмно - транспортировка
- Купить устройство программируемых логических контроллеров
- Купить регулятор давления воздуха
- Шлифовальные шпиндели
- Автоматическая проверка цвета поставщик
- Алмазный шлифовальный круг черепашка
- Купить платформа для обучения промышленному контролю
- Ведущий sand core grinding