





Плата привода промышленного робота
Итак, плата привода промышленного робота… Многие новички воспринимают это как черный ящик, который просто управляет двигателями. Но это, конечно, сильно упрощает. Реальность гораздо интереснее и сложнее. На практике, выбор этой самой платы – это не просто поиск компонента с нужными характеристиками, а целый комплексный процесс, который влияет на производительность, надежность и даже стоимость всей роботизированной системы. Несколько лет работы в этой сфере убедили меня в этом. От неправильного выбора – и потом переделывать придется, а это всегда дороже и дольше.
Основные задачи и функциональность платы управления
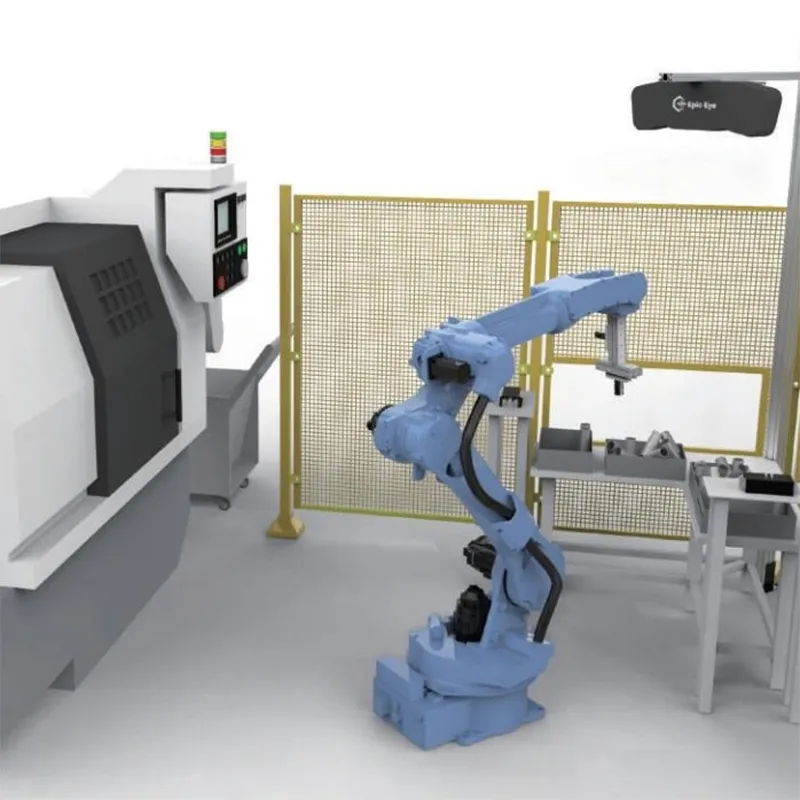
Прежде всего, важно понимать, что плата привода промышленного робота выполняет ряд ключевых задач. Это не только управление двигателями, но и обработка сигналов от датчиков, взаимодействие с контроллером робота, обеспечение обратной связи, и иногда даже – встроенные алгоритмы обработки данных. В идеале, она должна быстро и точно реагировать на команды, обеспечивая плавность и безопасность работы робота. Например, если речь идет о точных операциях, например, в микроэлектронике, то нужна плата с минимальной задержкой. А для более грубой работы, например, в сварке, уже важна способность выдерживать повышенные нагрузки и температурные колебания. Ранее мы часто сталкивались с ситуацией, когда плата просто не справлялась с нагрузкой, что приводило к сбоям в работе и необходимости дорогостоящего ремонта.
Что касается функциональности, то современные платы управления предлагают огромное количество возможностей. От простого управления сервоприводами до сложных алгоритмов управления траекторией движения, от встроенного энкодерного считывания до возможности подключения к сетевым протоколам. Важно понимать, какие конкретно функции необходимы для вашей задачи, и не переплачивать за то, что не будет использоваться.
Типы плат управления: выбор подходящего варианта
Существует несколько основных типов плат управления для промышленных роботов, каждый из которых имеет свои преимущества и недостатки. Это, в первую очередь, платы для сервоприводов, платы для шаговых двигателей, и платы для постоянных двигателей. Выбор зависит от типа привода, используемого в роботе. Сервоприводы обычно требуют более мощных и сложных плат управления, способных обеспечивать точное управление углом поворота. Шаговые двигатели, как правило, проще в управлении, но требуют более низких токов. Постоянные двигатели, в свою очередь, характеризуются высокой мощностью и используются в основном в тяжелых промышленных роботах.
В последнее время набирают популярность платы с встроенными процессорами и расширенными возможностями обработки данных. Такие платы позволяют реализовать сложные алгоритмы управления, выполнять диагностику и мониторинг состояния робота, а также интегрировать его с другими системами автоматизации. Я помню один проект, где мы использовали плату с встроенным контроллером для реализации алгоритма оптимизации траектории движения робота, что позволило значительно сократить время выполнения операции. Но это, разумеется, увеличивает стоимость и сложность системы.
Например, платы от компании Mindlink Robot
Компания ООО ?Аньхой Мок Робототехника? предлагает широкий спектр решений, от базовых плат управления до высокопроизводительных систем для сложных задач. Их платы отличаются надежностью и простотой в использовании, а также широкой совместимостью с различными типами роботов и приводов. Мы использовали их решения в нескольких проектах, и всегда оставались довольны результатом. В частности, их платы хорошо зарекомендовали себя в задачах роботизированной упаковки и сортировки.
Ключевые параметры, на которые следует обратить внимание
При выборе платы привода промышленного робота важно обратить внимание на ряд ключевых параметров. Во-первых, это напряжение питания и ток, которые должны соответствовать требованиям приводов робота. Во-вторых, это количество каналов управления, которое должно быть достаточным для управления всеми приводами. В-третьих, это тип интерфейсов, которые должны быть совместимы с контроллером робота и другими устройствами. Например, для подключения к современным контроллерам часто используется Ethernet или CAN шина. И, конечно, важна надежность платы и ее способность выдерживать сложные условия эксплуатации. Не стоит экономить на качестве, это может привести к серьезным проблемам в будущем. Один раз купили дешёвую плату – и через месяц выкидывали, из-за постоянных сбоев и перегрева. Потом стали выбирать более дорогие, но надежные решения, и это окупилось в долгосрочной перспективе.
Еще один важный аспект – это наличие программного обеспечения для настройки и программирования платы. Чем более удобным и функциональным является программное обеспечение, тем проще будет интегрировать плату в систему управления роботом. Хорошим вариантом является плата с поддержкой популярных языков программирования, таких как Python или C++. Это позволяет реализовать сложные алгоритмы управления и автоматизации, адаптированные к конкретной задаче.
Проблемы и распространенные ошибки
В процессе работы с платами привода промышленного робота часто возникают различные проблемы. Одна из самых распространенных – это перегрев платы. Это может быть вызвано повышенной нагрузкой на платы, недостаточной вентиляцией, или неправильным выбором радиатора. Необходимо следить за температурой платы и принимать меры для ее охлаждения. Например, можно использовать вентиляторы, радиаторы, или даже жидкостное охлаждение. Иногда причина перегрева кроется в неправильной пайке или плохо контактах. Мы часто сталкиваемся с этим, особенно при работе с платами, собранными некачественно.
Еще одна распространенная ошибка – это неправильная настройка параметров платы. Например, неправильно заданные значения тока или напряжения могут привести к повреждению приводов или платы. Необходимо внимательно изучить документацию и правильно настроить параметры платы в соответствии с требованиями приводов робота. Не стоит полагаться на эмпирические методы, это может привести к серьезным последствиям. Мы разрабатываем собственные скрипты для автоматической настройки параметров платы, что позволяет избежать ошибок и ускорить процесс интеграции.
Заключение: что нужно помнить
Таким образом, выбор платы привода промышленного робота – это не просто техническая задача, а комплексный процесс, требующий учета множества факторов. Необходимо понимать задачи, которые должна решать плата, учитывать тип приводов, параметры работы, и наличие программного обеспечения. Не стоит экономить на качестве, и всегда следует внимательно изучать документацию и соблюдать правила эксплуатации. Хороший выбор платы управления – это залог надежной и эффективной работы промышленного робота. В конечном счете, правильный выбор и грамотная эксплуатация платы привода промышленного робота – это инвестиция в долгосрочную стабильность и производительность вашего производственного процесса. И, поверьте, это окупится.
Соответствующая продукция
Соответствующая продукция







Самые продаваемые продукты
Самые продаваемые продукты







Связанный поиск
Связанный поиск- Дозирующие насосы для окрасочных роботов
- Бесщеточный модуль привода поставщик
- Купить инверторные сплит системы
- Роботы kuka поставщик
- Высококачественный плк
- Известный система транспортировки
- Высококачественный платформа для обучения промышленному контролю
- Известный бесщеточный модуль привода
- Высококачественный роботы fanuc
- Автоматическое погружное покрытие песчаных стержней поставщик