





Робот манипулятор kuka
Робот манипулятор KUKA – это, на первый взгляд, дорогостоящее удовольствие, требующее сложной интеграции и глубоких знаний. Многие начинающие компании сходят с ума, думая, что просто купив робота, они сразу получат автоматизацию процессов. На деле же – это только начало пути. По моему опыту, самый большой вызов не в самом KUKA, а в понимании, как его эффективно заставить работать именно для ваших задач, а не наоборот. Обсудим это подробно, приведем примеры, и, возможно, кто-то из читателей найдет полезные идеи.
Первые шаги: выбор робота и применение
Когда речь заходит о выборе робота манипулятора KUKA, возникает огромное количество вопросов. Мощность, грузоподъемность, рабочая область, точность, скорость – все это необходимо учитывать. Но ключевой момент, как мне кажется, это четкое понимание задачи. Нельзя просто взять самый мощный робот, надеясь, что он решит все проблемы. Наши клиенты часто приходят к нам с запросом типа: 'Нам нужен робот для сборки этих деталей'. Но мы начинаем с вопроса: 'Какие детали? Как часто собираются? Какая точность требуется?' От ответов на эти вопросы зависит выбор оптимальной модели.
Например, недавно мы работали с компанией, производящей электронные компоненты. Они хотели автоматизировать процесс сборки печатных плат. Изначально рассматривали несколько моделей KUKA, включая KUKA KR 6 R900. Однако, после анализа требуемой точности сборки и скорости, пришли к выводу, что более компактный KUKA KR 4 R900 был более подходящим вариантом. Более мощный робот был бы избыточен и увеличил общую стоимость системы. Важно помнить, что не всегда самый большой – самый лучший.
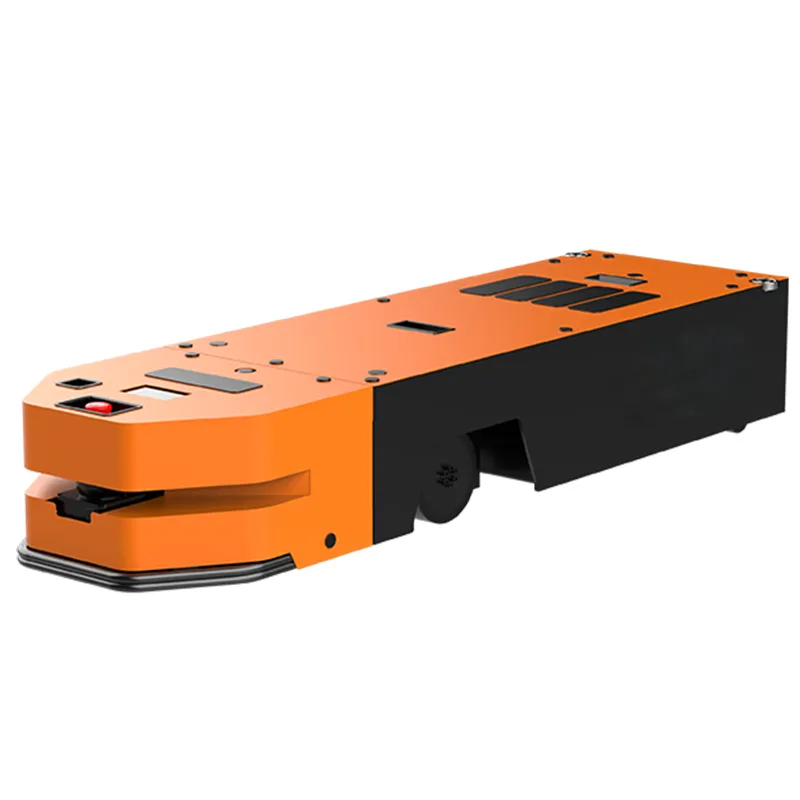
В процессе выбора я часто сталкиваюсь с недооценкой важности автоматизации не только манипуляции, но и подвода материалов, контроля качества, и интеграции с существующими системами управления. Просто заставить робота двигать руками – это далеко не все. Нам приходится решать вопросы AGV/AMR, систем машинного зрения, и интеграции с MES/ERP. Это создает дополнительную сложность, но и открывает возможности для более эффективной автоматизации.
Интеграция и программирование: тонкости и подводные камни
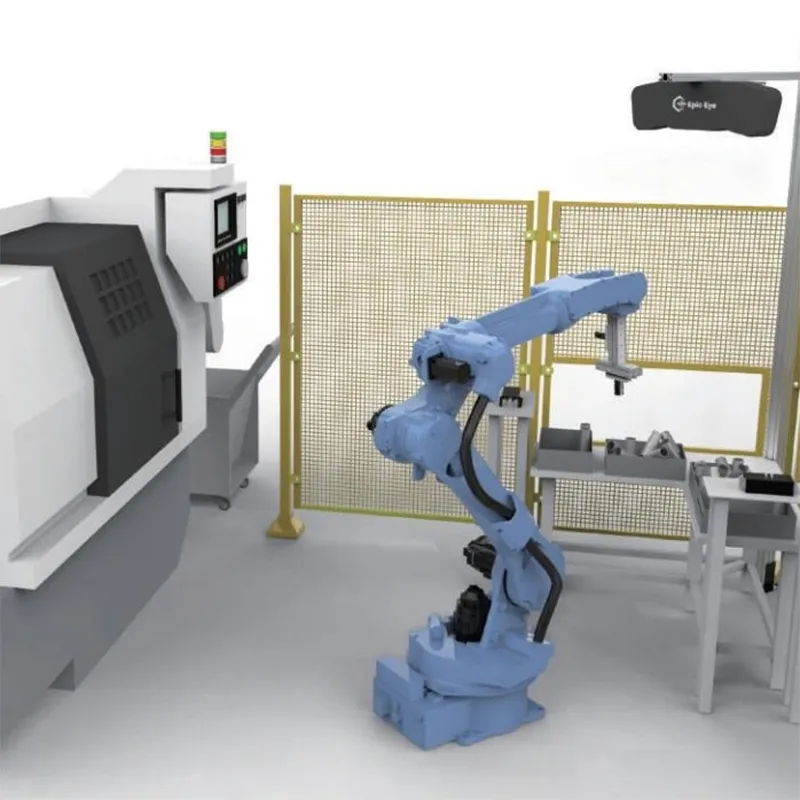
Интеграция робота манипулятора KUKA в производственную линию – это комплексная задача, требующая участия специалистов разных профилей: программистов, электриков, механиков. Один из распространенных подводных камней – неправильное планирование траектории движения робота. Даже небольшая ошибка в планировке может привести к столкновениям с оборудованием или другими роботами. Мы используем KUKA.Sim для моделирования траекторий и выявления возможных проблем еще до физической установки робота.
Программирование KUKA осуществляется на языке KUKA Robot Language (KRL). Хотя KRL достаточно прост в освоении, для создания сложных алгоритмов требуется определенный опыт и знания. Мы часто используем библиотеки и готовые решения для решения типовых задач, что позволяет сократить время разработки и снизить вероятность ошибок. Но, безусловно, настройка и отладка всегда требует внимательности и аккуратности. Особенно это касается задач, требующих высокой точности и повторяемости.
Важный аспект интеграции – это защита робота и персонала. Мы используем фотоэлектрические барьеры и другие системы безопасности для предотвращения несчастных случаев. Необходимо также проводить регулярные проверки и обслуживание системы безопасности, чтобы убедиться в ее работоспособности. Часто забывают о правилах безопасной работы рядом с роботами, что может привести к серьезным последствиям. Обучение персонала – ключевой фактор обеспечения безопасности.
Обслуживание и ремонт: поддержание работоспособности системы
Роботы манипуляторы KUKA, как и любое сложное оборудование, требуют регулярного обслуживания и ремонта. Мы предлагаем широкий спектр услуг по технической поддержке и обслуживанию роботов, включая профилактические осмотры, калибровку, замену изношенных деталей, и ремонт. Один из самых частых видов ремонта – это замена энкодеров и серводвигателей. Эти детали подвергаются интенсивному износу и требуют своевременной замены, чтобы избежать поломок и простоев.
Важно соблюдать регламент технического обслуживания, чтобы продлить срок службы робота и избежать дорогостоящего ремонта. Мы предлагаем различные пакеты обслуживания, которые включают в себя регулярные проверки и техническое обслуживание. Кроме того, мы осуществляем удаленную диагностику роботов, что позволяет быстро выявлять и устранять неисправности. Это значительно сокращает время простоев и повышает эффективность производства.
Наши специалисты постоянно проходят обучение и повышение квалификации, чтобы быть в курсе последних разработок в области робототехники. Мы сотрудничаем с KUKA и другими производителями оборудования, чтобы обеспечить нашим клиентам доступ к самым современным технологиям и решениям. Помимо технического обслуживания, мы также предлагаем консультации по оптимизации работы роботов и повышению производительности.
Практический пример: роботизированная шлифовка деталей
Один из интересных проектов, над которым мы работали, связан с роботизированной шлифовкой деталей. Компания производила компоненты для автомобильной промышленности. Процесс шлифовки был трудоемким и подверженным человеческому фактору, что приводило к неровностям и браку. Мы разработали систему с использованием робота манипулятора KUKA и специализированного шлифовального инструмента. Результат – повышение качества деталей и снижение затрат на производство. Система обеспечивала высокую точность и повторяемость шлифовки, а также снизила время цикла на 30%. Кроме того, робот обеспечивал более безопасные условия труда для персонала.
В этом проекте ключевым фактором успеха была интеграция системы машинного зрения для контроля качества. Система машинного зрения автоматически определяла наличие дефектов на деталях и исключала бракованные изделия из дальнейшего производственного процесса. Это позволило существенно повысить качество продукции и снизить количество отходов. Мы также использовали KUKA.Sim для моделирования процесса шлифовки и оптимизации траектории движения робота.
Особое внимание уделялось автоматизации загрузки и выгрузки деталей. Мы использовали AGV/AMR для доставки деталей к рабочему месту робота и вывоза обработанных деталей. Это позволило максимально сократить время цикла и повысить производительность системы. В целом, этот проект продемонстрировал эффективность использования роботов манипуляторов KUKA для решения сложных задач в области машинообработки.
Выводы и перспективы
В заключение хочу сказать, что роботизированная манипуляция – это перспективное направление развития производства. Роботы манипуляторы KUKA предоставляют широкие возможности для автоматизации различных производственных процессов. Однако, для успешной интеграции робота необходимо четкое понимание задачи, правильный выбор оборудования, тщательное планирование и квалифицированное обслуживание. Нельзя забывать о важности безопасности и обучения персонала. С моей точки зрения, автоматизация с использованием KUKA – это не просто замена человеческого труда, это возможность повысить эффективность производства, улучшить качество продукции и снизить затраты. Буду рад ответить на ваши вопросы и поделиться своим опытом.
Соответствующая продукция
Соответствующая продукция







Самые продаваемые продукты
Самые продаваемые продукты







Связанный поиск
Связанный поиск- Роботизированная окрасочная станция
- Смесители двухкомпонентных материалов
- Известный алмазный шлифовальный круг черепашка
- Купить контроль сварных швов и точек
- Высококачественный контроль сварных швов и точек
- Известный окрасочные пистолеты дюзы
- Ведущий алмазный шлифовальный круг 100
- Высококачественный соединитель кабельного лотка
- Роботы fanuc заводы
- Насос для подачи краски