





Цепной конвейер
Цепной конвейер – штука, казалось бы, простая. Но как часто, работая с ним, начинаешь понимать, что 'простота' – это лишь видимость. На первый взгляд – цепь, ролики, мотор… вроде бы все понятно. А потом начинаются проблемы: заклинивания, перегрузки, неровная подача, и вот уже хочется выкинуть все к черту. Я вот много лет занимаюсь разработкой и внедрением робототехнических решений, включая системы транспортировки, и могу с уверенностью сказать, что в этой области нюансов – хоть отбавляй. Поэтому хочу поделиться некоторыми наблюдениями, опытом и, пожалуй, ошибками, которые мы совершали, прежде чем добрались до более-менее стабильных решений.
Оптимизация цепного конвейера: более чем просто расчет скорости
Многие начинающие проектируют цепной конвейер, исходя из грубой оценки скорости и веса транспортируемых деталей. Это, конечно, отправная точка, но зачастую приводит к проблемам. Например, недооценка инерции детали, особенно если это крупный или тяжелый объект. В итоге – постоянные заклинивания и необходимость в ручной подталкивании. Я помню один проект на производстве автомобильных деталей. Заказчик хотел использовать цепной конвейер для подачи крупных кузовных панелей. Оценили скорость, выбрали привод – все как по учебнику. Но потом начались проблемы с 'проскальзыванием' цепи и повреждением панелей. Оказалось, что при резком ускорении и замедлении, возникают значительные перегрузки, которые приводят к деформации цепи и, как следствие, к проблемам с подачей. В итоге пришлось пересчитывать все параметры с учетом динамической нагрузки и использовать более мощный привод, а также систему демпфирования для смягчения рывков.
Помимо скорости, важно учитывать геометрию конвейера, наличие изгибов и углов. Изгибы – это всегда потенциальные точки заклинивания. Они создают дополнительное напряжение в цепи и могут приводить к неравномерному распределению нагрузки. Поэтому стараемся избегать резких изгибов и, если они необходимы, использовать специальные ролики с низким коэффициентом трения и повышенной прочностью. Также, важно продумать систему компенсации деформации деталей. Если детали имеют неровную поверхность или подвержены деформации при транспортировке, то необходимо предусмотреть специальные прижимные ролики или другие механизмы для их фиксации. Мы однажды столкнулись с проблемой транспортировки деталей с небольшими отклонениями в размерах. Простое использование цепного конвейера приводило к их смещению и, как следствие, к перегрузкам. Решение – использование системы с регулируемым прижимом, которая автоматически компенсировала отклонения в размерах.
А еще, не стоит забывать о системе смазки. Правильная смазка – это залог долговечности цепного конвейера. Недостаточная смазка приводит к повышенному трению и износу цепи и роликов. Избыточная смазка, наоборот, может приводить к скольжению и снижению эффективности. В зависимости от условий эксплуатации, необходимо выбирать соответствующий тип смазки и систему ее подачи. Мы тестировали разные типы смазки для цепного конвейера в условиях высокой температуры и загрязнения. Оказалось, что наиболее эффективной была синтетическая смазка с добавлением антиоксидантов и антикоррозийных присадок. Она обеспечивала хорошее смазывание, устойчивость к высоким температурам и защиту от коррозии.
Проблемы с точностью позиционирования и координации
Одним из распространенных вопросов при внедрении цепного конвейера является обеспечение точного позиционирования деталей. Если требуется высокая точность сборки или последующей обработки, то необходимо предусмотреть систему позиционирования, которая будет гарантировать, что детали будут подаваться в нужное место в нужное время. Это может быть реализовано с помощью различных механизмов: позиционирующих роликов, датчиков, систем управления движением. В наших проектах мы часто используем комбинацию нескольких методов для достижения необходимой точности. Например, мы можем использовать систему позиционирующих роликов для точной подачи деталей на конвейер, а затем использовать датчики для контроля их положения и корректировки траектории движения.
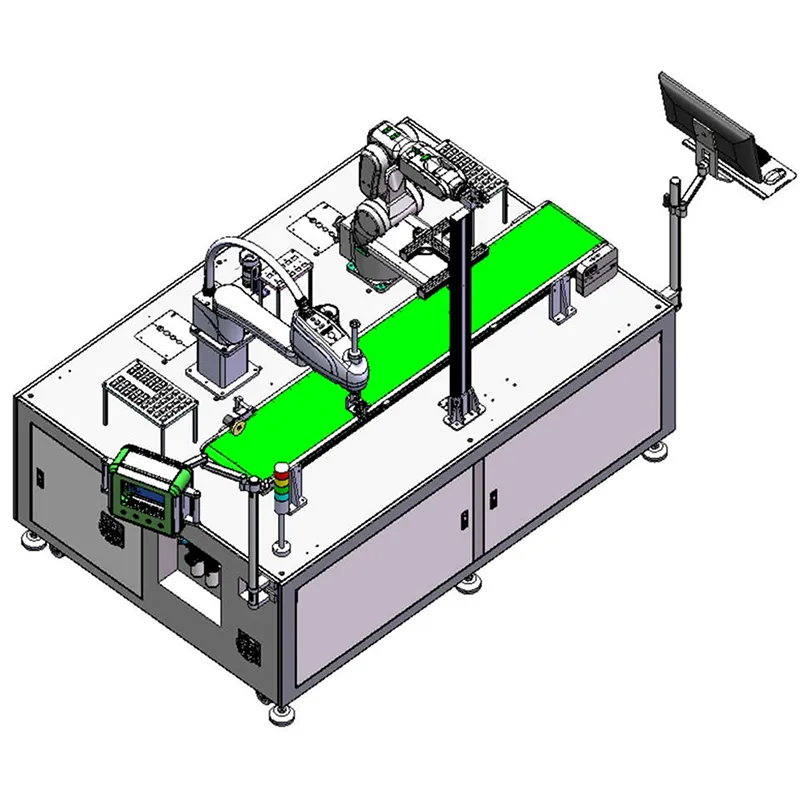
Важно помнить, что позиционирование – это не только механическая задача, но и задача программного обеспечения. Необходимо разработать алгоритм управления движением цепного конвейера, который будет учитывать все факторы, влияющие на точность позиционирования: скорость конвейера, инерцию деталей, влияние температуры и других внешних факторов. Мы использовали ПЛК и систему машинного зрения для управления движением цепного конвейера в одном из наших проектов. Система машинного зрения позволяла контролировать положение деталей в реальном времени и корректировать траекторию движения конвейера, чтобы обеспечить точное позиционирование. Это позволило нам достичь необходимой точности позиционирования и значительно повысить эффективность производства.
Ещё одна проблема – это координация цепного конвейера с другими производственными процессами. Если цепной конвейер должен работать в связке с другими машинами или оборудованием, то необходимо обеспечить их синхронизацию. Это может быть реализовано с помощью различных методов: использования общих датчиков и систем управления, синхронизации по времени, использования интерфейсов связи (Ethernet/IP, Profinet и др.). Мы однажды столкнулись с проблемой координации цепного конвейера с роботом-манипулятором. Робот должен был брать детали с цепного конвейера и выполнять сборку. Для решения этой задачи мы использовали систему обмена данными между цепным конвейером и роботом, которая позволяла роботу получать информацию о положении деталей на конвейере и синхронизировать свои действия с движением конвейера.
Альтернативы и новые тенденции: от AGV до интеллектуальных систем
Сегодня все больше внимания уделяется автоматизации транспортных систем. Помимо традиционных цепных конвейеров, все большую популярность приобретают автоматизированные тележки (AGV) и автономные мобильные роботы (AMR). AGV – это транспортные средства, которые перемещаются по заданному маршруту по проводам или по меткам на полу. AMR – это автономные роботы, которые могут самостоятельно перемещаться по производственному помещению, избегая препятствий и планируя оптимальный маршрут. Переход на AGV/AMR позволяет значительно повысить гибкость и мобильность производственной системы, а также сократить затраты на инфраструктуру. ООО ?Аньхой Мок Робототехника? активно работает в этой сфере и предлагает комплексные решения по внедрению AGV и AMR.
Другой важной тенденцией является внедрение интеллектуальных систем управления цепным конвейером. Такие системы используют датчики, алгоритмы машинного обучения и облачные технологии для оптимизации работы конвейера. Например, интеллектуальная система может автоматически регулировать скорость конвейера в зависимости от загруженности, прогнозировать поломки оборудования и планировать профилактическое обслуживание. Мы разрабатываем системы мониторинга состояния цепного конвейера на основе данных с датчиков вибрации, температуры и давления. Это позволяет нам выявлять потенциальные проблемы на ранней стадии и предотвращать аварии.
И, конечно, нельзя забывать о развитии роботизированных манипуляторов и систем машинного зрения. Сочетание цепного конвейера с роботизированными манипуляторами и системами машинного зрения позволяет создавать полностью автоматизированные линии по сборке и обработке деталей. Это значительно повышает производительность, снижает затраты на рабочую силу и улучшает качество продукции. Мы активно сотрудничаем с ведущими производителями робототехнического оборудования и предлагаем комплексные решения по автоматизации производственных процессов.
Неудачи и уроки: что не стоит повторять
Были и неудачные проекты, которые позволили нам извлечь ценные уроки. Например, мы однажды попытались использовать цепной конвейер для транспортировки очень хрупких деталей. Мы недооценили влияние вибрации и ударов на детали, в результате чего детали постоянно разбивались. Пришлось пересмотреть конструкцию конвейера и добавить систему амортизации, а также использовать более мягкие материалы для роликов. Урок – всегда учитывайте особенности транспортируемых деталей и их чувствительность к внешним воздействиям.
Соответствующая продукция
Соответствующая продукция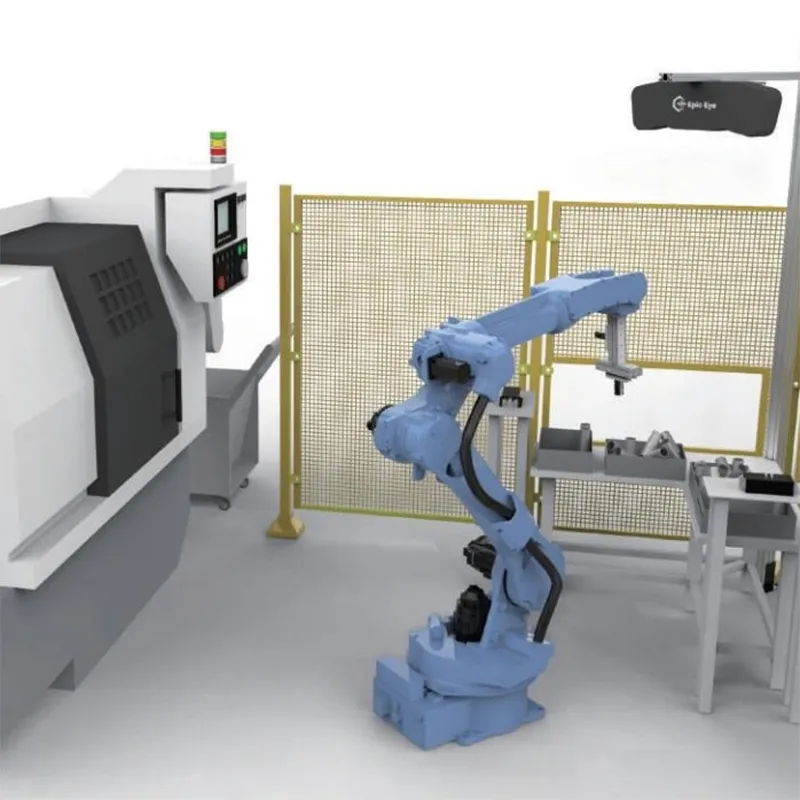








Самые продаваемые продукты
Самые продаваемые продукты







Связанный поиск
Связанный поиск- Высококачественный кабельный лоток
- Купить автоматизированная шлифовка чугунных отливок
- Роботизированная шлифовка автомобильных компонентов заводы
- Электродвигатель промышленного робота завод
- Известный абразивный головок из сплава
- Ведущий учебный платформ для промышленных роботов
- Ведущий алмазный гибкий шлифовальный круг черепашка
- Купить роботизированная окрасочная система
- Роботизированный шлифование поставщики
- Ведущий оборудование для удаления пыли